Работа эхолота видео: Как работает эхолот для рыбалки, видео, обзор принципа работы
Как работает эхолот для рыбалки, видео, обзор принципа работы
Как работает эхолот
Эхолот состоит из двух основных частей – это преобразовательный элемент и главный процессор плюс дисплей . Последний по сути представляет собой небольшой компьютер, который обрабатывает информацию, полученную от преобразователя, и преобразует ее в цифровые сигналы на экране.
Преобразователь содержит пьезоэлектрические кристаллы, которые используются для отправки эхолота импульсов в воду с помощью вибрации на определенной частоте. Когда эти импульсы сталкиваются с объектом, они отражаются обратно в датчик , который принимает сигналы и передает их основному блоку для интерпретации.
Схема, показывающая, как работает отправка и получение сигнала эхолота
На основе интенсивности возвращаемого сигнала, а также времени, необходимого для прохождения через воду, эхолот может рассчитать форму и местоположение объектов, отражающих импульс сонара. Этот процесс повторяется несколько десятков раз в секунду, что помогает улучшить разрешение и генерировать живое изображение того, что происходит в конусе сонара.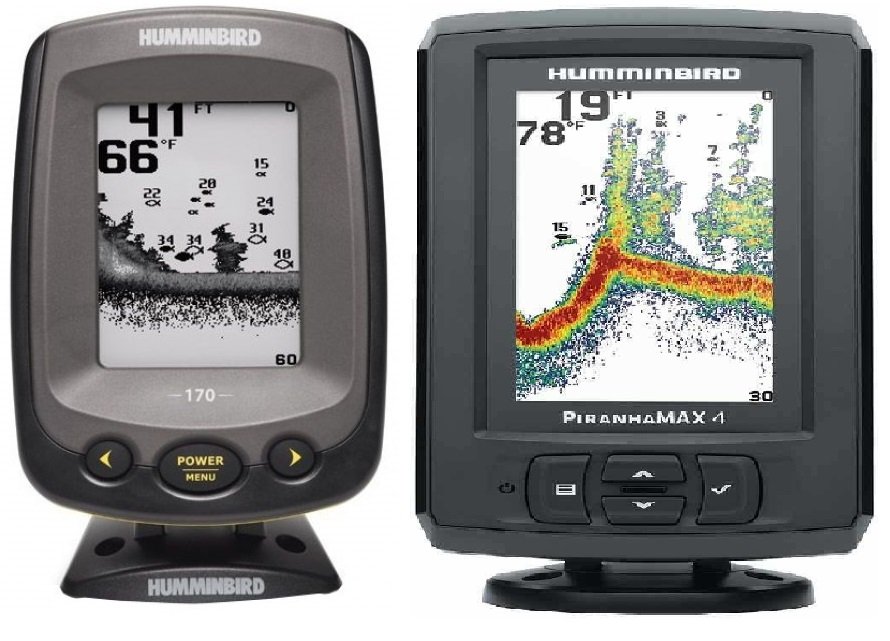
Детали, которые можно интерпретировать по сигналам сонара, также зависят от мощности и частоты импульсов. Из-за этого многие эхолоты используют несколько разных частот одновременно для сбора дополнительной информации.
Рыбаки часто задают вопрос « Можно ли использовать эхолот вне воды». Короткий ответ- нет. Эхолот работает только в воде. Однако вы можете быть удивлены, узнав, что вы можете использовать эхолот через лед, поскольку лед легко передает сигналы сонара.
Обзор наиболее популярных моделей
При выборе эхолота для рыбалки стоит обратить внимание на изделия известных торговых марок Humminbird и JJ-connect.
Наиболее востребованными считаются:
Humminbird PiranhaMAX 230 Portable
Прибор беспроводной и предназначается для рыбалки с берега. Технические характеристики устройства: способен определять глубину водоема до 36 метров, передает сигнал на расстояние до 40 м в радиусе. Работает независимо от условий рыбалки, благодаря технологиям Dual Beam и Smart Cast.
Достоинство прибора в том, что:
- Он способен определять размеры рыбы.
- Сканирует рельеф дна.
- Обладает функцией увеличения изображения.
Humminbird SmartCast RF35e
Прибор неплохо работает при ловле рыбы с берега. Характеризуется, как устройство, позволяющее определить глубину водоема до 35 м, с углом захвата порядка 90 градусов. Передатчик действует на расстоянии до 22 м.
Прибор однолучевой, поэтому сканирует дно в одной плоскости. Чтобы определить характер рельефа дна, прибор необходимо перемещать.
Достоинства прибора:
- Можно получить качественную картинку.
- Оптимальный предел определения глубины.
- Может определять величину рыбы.
JJ-connect Fisherman Wireless 3 Deluxe
Неплохая разработка беспроводного эхолота с датчиком. Характеристики устройства следующие: определяет глубину до 40 м, с углом захвата до 90 градусов, с радиусом действия датчика до 40 м.
Достоинства модели:
- Прибор сверхчувствительный, поэтому реагирует даже на мелкую рыбу.

- На экране четко отображаются все объекты.
Портативный эхолот JJ-Connect Fisherman Wireless-3 Deluxe
Fish Finder ffw718 Wireless
Эта модель считается универсальным эхолотом, с рабочими характеристиками: определяет глубины до 35 м, с радиусом действия передатчика до 70 м. Есть возможность удлинять антенну, в результате чего увеличивается радиус до 300 метров.
Достоинства прибора:
- Определяет температуру воды водоема.
- Возможность регулирования чувствительности приемника.
- Автоматическое отключение устройства, если эхолот вытаскивается из воды.
- Корпус прибора надежный и водонепроницаемый.
- Может беспрерывно работать около 550 часов.
Тестируем Беспроводный эхолот Lucky FFW718
Fish finder luckylaker ff916
Эта модель представляет одну из последних разработок компании Lucky. Она отличается улучшенными эксплуатационными характеристиками и предназначается для различных условий рыбалки. С помощью этого прибора можно измерять глубины водоемов до 45 м, при угле захвата в 90 градусов. Прибор допустимо забрасывать на дальность до 50 метров.
С помощью этого прибора можно измерять глубины водоемов до 45 м, при угле захвата в 90 градусов. Прибор допустимо забрасывать на дальность до 50 метров.
Эхолот имеет функцию Wi-Fi, посредством которой информация может быть представлена на смартфоне или на планшете.
Способен определять глубины с точностью до десятых долей метра. Кроме этого, в нем предусмотрена функция звукового сигнала, а его тональность зависит от величины рыбы.
Эхолот Lucky FF916 Fish Finder LuckyLaker
2D гидролокатор против сонара с нижним изображением
Традиционные эхолоты полагаются на двухмерный гидролокатор (который включает гидролокатор CHIRP), в то время как последнее поколение эхолотов полагается на сонар нисходящего изображения .
Преобразователи традиционных 2D-эхолотов имеют круглую форму, и в результате они излучают сигнал гидролокатора, который расширяется до круглого конуса, когда он движется вниз через воду. Из-за этого они собирают информацию сонара из довольно широкой круглой области под лодкой.
С другой стороны, гидролокаторы с нижним изображением используют тонкий прямоугольный преобразователь, который направляет узкий луч гидролокатора прямо в воду. В результате нижняя съемка показывает очень подробную информацию, собранную в узком поперечном сечении прямо под лодкой.
У каждого типа гидролокатора есть свои преимущества и недостатки:
- Двухмерный гидролокатор отлично подходит для сканирования области под вами, чтобы найти промысловую рыбу, которая отображается на экране в виде арок. Однако очень часто очертания объектов на экране «нечеткие» и нечеткие, что затрудняет идентификацию деталей. Например, косяк рыбы-наживки обычно отображается как большая капля на традиционном двухмерном эхолокаторе-эхолоте, хотя CHIRP действительно улучшил производительность в этом отношении.
- Гидролокатор с нижним изображением отлично подходит для обнаружения объектов в виде дискретных структур, включая рыбу, покоящуюся на дне (которую невозможно обнаружить с помощью двухмерного гидролокатора), или отдельную рыбу внутри плотного косяка наживки.
 Недостатком этого типа гидролокатора является то, что он захватывает только очень узкую часть того, что находится прямо под лодкой, при этом упускает из виду все, что находится немного дальше.
Недостатком этого типа гидролокатора является то, что он захватывает только очень узкую часть того, что находится прямо под лодкой, при этом упускает из виду все, что находится немного дальше.
Ценовая политика
Основные показатели, на которые опираются рыболовы, выбирая эхолоты для рыбалки с лодки, – отзывы, цена и технические характеристики. С характеристиками устройств и отзывами мы уже познакомились, осталось разобраться с ценовой политикой. Для тех, кто хочет сэкономить или просто не готов тратить лишние деньги, есть неплохие эхолоты для рыбалки с лодки, цены (СПб, Москва или Киев – неважно, в магазинах цены практически не отличаются) на которые составляют 30-50 долларов. Представители такого ценового сегмента имеют небольшой экран и 1-2 луча. Небольшие габариты и низкая цена делают такие модели лучшим вариантом для новичков. Если с нижним пределом цен все понятно, то верхний, с появлением новых технологий, постоянно растет. Хорошими считаются эхолоты для рыбалки с лодки, цены на которые колеблются в пределах 200-300 долларов. Как вы понимаете, есть модели и подороже, но они обычно применяются только профессионалами.
Как вы понимаете, есть модели и подороже, но они обычно применяются только профессионалами.
Визуализация вниз по сравнению с боковой визуализацией
Как следует из названия, нижнее изображение сфокусировано прямо вниз в узком участке, в то время как боковое изображение посылает сигналы, направленные в стороны (как влево, так и вправо). Это помогает собрать информацию об общей области вокруг лодки.
Опять же, у каждого из этих типов гидролокаторов есть свои преимущества и недостатки:
- Боковое изображение отлично подходит для обзора большой территории, окружающей вашу лодку с обеих сторон. Вы можете быстро обнаружить выступающие структуры, такие как валуны, затонувшие деревья и заросли сорняков, а также определить плотность дна. Однако он не очень хорош для распознавания более мелких объектов, таких как рыба.
- Как уже упоминалось, визуализация вниз идеально подходит для получения подробной информации о том, что находится прямо под лодкой, но не дает общего обзора местности.

Как видите, ни одна из этих сонарных технологий сама по себе не идеальна. Вместо этого их лучше всего использовать в комбинации, поэтому многие современные эхолоты включают все три типа гидролокаторов.
Как только вы научитесь использовать каждый тип сонара отдельно, вы сможете переключаться между ними, чтобы получить максимальное количество информации. Ознакомьтесь с нашим подробным руководством о том, как читать эхолот, чтобы улучшить свои навыки в этой области.
Что такое CHIRP на эхолоте
Технология сонара CHIRP является относительно новой и расшифровывается как Compressed High Intensity Radar Pulse. В то время как традиционные 2D-сонары используют только одну частоту, сонар CHIRP использует диапазон разных частот, посылая как низкочастотные, так и высокочастотные сигналы.
Если вам интересно узнать больше о CHIRP, ознакомьтесь с нашей статьей о том, как читать сонар CHIRP .
Эхолоты с GPS
Многие современные модели эхолотов включают функцию GPS, которая действительно помогает повысить производительность. Во-первых, это позволяет вам переходить к определенным точкам на карте. Но даже лучше, он позволяет вам размещать GPS-маркер в определенных местах, которые вы хотите использовать в качестве ориентиров. Это может быть, например, риф, или большая подводная структура, такая как затонувший корабль, или районы, где наблюдается изменение плотности дна, что часто привлекает рыбу.
Во-первых, это позволяет вам переходить к определенным точкам на карте. Но даже лучше, он позволяет вам размещать GPS-маркер в определенных местах, которые вы хотите использовать в качестве ориентиров. Это может быть, например, риф, или большая подводная структура, такая как затонувший корабль, или районы, где наблюдается изменение плотности дна, что часто привлекает рыбу.
В некоторых моделях высокого класса используется GPS вместе с картплоттером. Таким образом, вы можете создать собственную карту вод, исследуя их, что позволит вам быстро и легко вернуться в лучшие места в будущем.
Двумя лучшими программами для картографии, доступными в настоящее время, являются Navionics и LakeMaster. Если вы хотите узнать о них больше, ознакомьтесь с нашей статьей о Lakemaster против Navionics – что лучше.
Влияние скорости движения на работу преобразователя
При изменении скорости движения судна в работе преобразователя иногда возникают сбои, приводящие к следующим последствиям:
- Возникновение шумовых помех на дисплее.

- Исчезновение отражений звуковых волн.
- Слабость полученных сигналов.
Основной причиной является непрерывный процесс парообразования, конденсации и лопания паровых пузырьков, что создает дополнительные шумы.
Повышенной чувствительность отличаются устройства, которые были установлены на транец, поскольку им приходится выдерживать тройную нагрузку:
- Они сами по себе являются источником кавитации.
- Получение шумовой нагрузки с поверхности корпуса плавательного средства.
- Поступление пузырьков, созданных при высоких оборотах гребного винта.
Типы преобразователей и как они работают
Хотя многие модели эхолотов продаются вместе с датчиком, их также можно приобрести отдельно, и можно использовать эхолот с несколькими различными типами датчиков.
Разные преобразователи работают на разных частотах, а это значит, что вам нужно выбрать правильную частоту для вашего конкретного применения. Для пресноводной спортивной рыбалки диапазон частот составляет от 50 до 300 кГц, наиболее распространенным является 200 кГц.
Кроме того, вы должны знать, что традиционные двухмерные датчики сонара отличаются от датчиков CHIRP. Итак, если вы хотите использовать CHIRP, убедитесь, что вы купили преобразователь с поддержкой CHIRP, который покрывает частоты, которые вы хотите использовать, что составляет 150-200 кГц для большинства пресноводных применений.
Если у вас есть датчик, но вы не уверены, что он работает должным образом, ознакомьтесь с нашей статьей о том, как определить, неисправен ли ваш датчик .
Тип установки преобразователя эхолота
Для разных типов преобразователей требуются разные способы монтажа. Внутри корпуса некоторые преобразователи не должны находиться в прямом контакте с водой, поскольку они могут передавать гидролокатор через корпус. Их можно приклеить к внутренней части корпуса. Однако они работают не со всеми типами корпуса, поэтому обязательно проверьте это перед покупкой.
Крепление на транце это наиболее распространенный тип крепления датчика, основанный на регулируемом кронштейне, прикрепленном к внешней стороне корпуса, обычно в задней части лодки или каяка. При таком креплении датчик погружается в воду.
При таком креплении датчик погружается в воду.
Крепление для троллингового двигателя некоторые преобразователи могут быть прикреплены к боковой стороне троллингового двигателя или даже вставлены в ступицу гребного винта, что также позволяет их вставлять в воду.
Заключение
Подводя итог, можно сказать, что за последние десятилетия технология эхолота прошла долгий путь. В моделях высочайшего качества теперь сочетаются сонар CHIRP, система обзора вниз, боковая съемка и GPS, и эта комбинация высококачественных технологий позволяет опытным рыболовам быстро и легко находить многообещающие места для рыбалки, хотя раньше они тратили дни или недели, пытаясь найти их.
Если вы хотите проверить еще несколько моделей высокого класса, которые охватывают все современные технологии сонара, ознакомьтесь с нашим обзором Lowrance Elite 9 TI , а также нашим обзором Garmin Striker 7SV . Наконец, если вы увлекаетесь подледной рыбалкой, вас может заинтересовать наш обзор лучшего флешера для подледной рыбалки .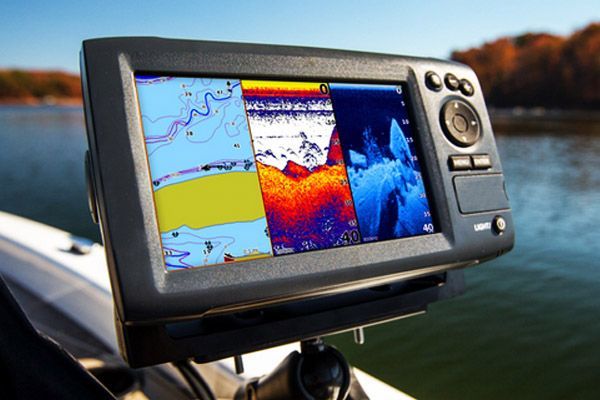
Влияние расположения преобразователя
Местонахождение преобразователя на судне может быть различным, все варианты имеют свои особенности, а также положительные и отрицательные стороны, которые рассматриваются ниже.
Преобразователь с установкой внутри корпуса
Прикрепление преобразователя сигналов к внутренним поверхностям корпуса плавательного средства возможно только, если они изготовлены из однослойного стеклопластика.
Важно соблюдать следующие условия монтажа:
- Для обеспечения надежности крепежа и фиксации положения используется эпоксидный клей, который не боится попадания влаги. От применения пластичного герметика необходимо отказаться по причине низких показателей акустической проводимости, что ухудшит функционирование устройства.
- Между устройством и водой должна располагаться только основная обшивка без дополнительных вставок, способных задерживать или частично поглощать сигналы.

Преобразователь с установкой на транец
Данный способ практикуется при монтаже на небольших плавательных средствах с низким показателем скорости передвижения.
Установка на транец имеет следующие особенности:
- Монтаж осуществляется на кронштейне, расположенном ниже уровня воды, он находится на транце.
- Конструкция должна обеспечивать возможность откидывания преобразователя назад при столкновении с какими-либо объектами, это защитная мера для минимизации риск повреждений.
- Главным преимуществом способа является легкость установки, демонтажа и обслуживания в процессе использования.
- Единственным существенным недостатком является близость гребных винтов, которые своими движениями способны уменьшить эффективность эхолота.
Преобразователь с установкой на корпусе («Truehull»)
Данный способ подразумевает монтаж устройства через специальное отверстие, вырезанное в поверхности дна плавательного средства.
Основные особенности заключаются в следующем:
- Предлагаемый вариант является самым эффективным, поскольку при работе преобразователя не будут создаваться какие-либо помехи, но он предполагает значительные финансовые траты.
- Установка таким способом рекомендуется на быстроходных и крупных плавательных средствах, чтобы максимально отдалить преобразователь от гребных винтов.
- Преобразователь, установленный на корпусе, должен регулярно очищаться для профилактики обрастания водорослями.
- Установка является довольно сложной, возможно потребуется помощь специалистов.
работа эхолота практик 6м зимой видео
работа эхолота практик 6м зимой видео
работа эхолота практик 6м зимой видео
>>>ПЕРЕЙТИ НА ОФИЦИАЛЬНЫЙ САЙТ >>>
Что такое работа эхолота практик 6м зимой видео?
Все эхолоты «Практик» характеризуются умеренным энергопотреблением. В более ранних версиях используются пальчиковые батарейки с возможностью работы до 120 часов (5 суток). В более поздних версиях используется встроенный аккумулятор. Время работы блока дисплея от аккумулятора зависит от подключённого датчика. С проводным датчиком работать без подзарядки можно до 20 часов, с беспроводным датчиком (маяком) – до 7 часов.
В более ранних версиях используются пальчиковые батарейки с возможностью работы до 120 часов (5 суток). В более поздних версиях используется встроенный аккумулятор. Время работы блока дисплея от аккумулятора зависит от подключённого датчика. С проводным датчиком работать без подзарядки можно до 20 часов, с беспроводным датчиком (маяком) – до 7 часов.
Эффект от применения работа эхолота практик 6м зимой видео
Я давно приценивался к покупке эхолота практик и наконец решился! На прошлой неделе купил. И уже испытал на рыбалке. Свои ощущения могу передать одним словом – восторг! Хотя, конечно, за одну рыбалку не возможно изучить и опробовать все возможности этого устройства, но то что я увидел меня изумило и обрадовало. Конечно же, я ожидал, что прибор мне будет показывать наличие рыбы под лункой, но то что он так хорошо отображает малюсенькую мормышку меня очень приятно удивило! Случайно, в режиме Fish ID, увидел в правом маленьком экране характерные полосочки, которые конечно же отсевались фильтром и не попадали на основную часть экрана. После этого стал переключаться в режим Про и Флэшера и уже целенаправлено рассматривать как на поведение мормышки реагирует рыба! Моя рыбалка совершенно преобразилась. И это ведь я ещё не эксперементировал с чувствительностью и, откровенно говоря, только в конце рыбалке заметил, что нужно переключиться в режим “Зима”! 🙂 Спасибо всем причастным за это устройство!
После этого стал переключаться в режим Про и Флэшера и уже целенаправлено рассматривать как на поведение мормышки реагирует рыба! Моя рыбалка совершенно преобразилась. И это ведь я ещё не эксперементировал с чувствительностью и, откровенно говоря, только в конце рыбалке заметил, что нужно переключиться в режим “Зима”! 🙂 Спасибо всем причастным за это устройство!
Мнение специалиста
Главные плюсы эхолтов Практик: Морозостойкость, рабочая частота сигнала и угол обзора датчика позволяют рассматривать приборы данного бренда как максимально эффективные в условиях зимней рыбалки. Тем не менее, их функционал рассчитан и на рыбалку с лодки, а в некоторых моделях – на рыбалку с берега.
Как заказать
Для того чтобы оформить заказ работа эхолота практик 6м зимой видео необходимо оставить свои контактные данные на сайте. В течение 15 минут оператор свяжется с вами. Уточнит у вас все детали и мы отправим ваш заказ. Через 3-10 дней вы получите посылку и оплатите её при получении.
Отзывы покупателей:
Аня
Эхолот Практик работает отлично в любое время года. Очень компактный и легкий что является очень важным фактором. Питание от одной элемента питания АА не важно аккумулятор это или простая батарейка.
Вика
Эхолот Практик 6М сделает любую рыбалку удачной, ведь он определяет не только местонахождение рыбы, но и ее количество. Прибор защищен от падения и проникновения влаги, а кабель достаточно прочен и морозоустойчив. Технические характеристики эхолота позволяют узнать глубину дна и успешно ловить рыбу как летом, так и зимой.
Эхолот Практик отличный подарок, который мне подарили друзья на день рождения. Сразу не верилось, что мне он нужен, я привык рыбачить по-старинке, без новомодных девайсов. Но как оказалось, я зря сомневался. Эхолот хорош! Показывает и даже на быстром ходу, как обещает производитель погрешность 5 см (показывает дно , которое входит в диапазон 40 градусов). Для более точно измерения можно настроить режим “глубина”, но лично я с линейкой дно не мерял… Рыбу тоже показывает, особенно азарт берет, когда видишь стаю рыбы. Где купить работа эхолота практик 6м зимой видео? Главные плюсы эхолтов Практик: Морозостойкость, рабочая частота сигнала и угол обзора датчика позволяют рассматривать приборы данного бренда как максимально эффективные в условиях зимней рыбалки. Тем не менее, их функционал рассчитан и на рыбалку с лодки, а в некоторых моделях – на рыбалку с берега.
Для более точно измерения можно настроить режим “глубина”, но лично я с линейкой дно не мерял… Рыбу тоже показывает, особенно азарт берет, когда видишь стаю рыбы. Где купить работа эхолота практик 6м зимой видео? Главные плюсы эхолтов Практик: Морозостойкость, рабочая частота сигнала и угол обзора датчика позволяют рассматривать приборы данного бренда как максимально эффективные в условиях зимней рыбалки. Тем не менее, их функционал рассчитан и на рыбалку с лодки, а в некоторых моделях – на рыбалку с берега.
Летние эхолоты для целей зимы малопригодны из-за своей громоздкости и плохой переносимости минусовых . Вот это коротенькое видео, без лишних отступлений и бла-бла-бла, поможет вам с легкостью настроить эхолот Практик – 6М, Практик – 6S и понять как всё должно выглядеть на экране. Казанские просторы. Зимой я беру эхолот на каждую рыбалку, а их в неделю бывает 2-4, половина из . унибокс Практик 6М – служит и для хранения/перевозки, так незаменим и при . Об особенностях чтения сигналов эхолота и режимах работы – в отдельных статьях. Результат многолетней работы инженеров научно-производственной компании Практик-НЦ, которые разрабатывают эхолокационное . Зимняя рыбалка с эхолотом ПРАКТИК 7 RF. Ловля Окуня и Плотвы Зимой (Эхолот Практик 7RF). Испытания эхолота Практик 6М в различных водоемах и климатических условиях подтверждают надежность и точность работы этой системы наблюдения. . Этот режим в основном нужен зимой, особенно при работе на глубине от 8 метров. Изображения на экране во время работы. На экране эхолота в верхнем.
Результат многолетней работы инженеров научно-производственной компании Практик-НЦ, которые разрабатывают эхолокационное . Зимняя рыбалка с эхолотом ПРАКТИК 7 RF. Ловля Окуня и Плотвы Зимой (Эхолот Практик 7RF). Испытания эхолота Практик 6М в различных водоемах и климатических условиях подтверждают надежность и точность работы этой системы наблюдения. . Этот режим в основном нужен зимой, особенно при работе на глубине от 8 метров. Изображения на экране во время работы. На экране эхолота в верхнем.
http://jadeite.ru/images/ekholot_praktik_7_bwf_obzor6800.xml
http://jadeite.ru/images/ekholot_praktik_7_bwf_obzor6800.xml
https://pth.pl/userfiles/ekholot_praktik_7_wi_fi_bwf8400.xml
http://junckers.cz/img/wswg/kupit_ekholot_praktik_v_zelenograde_ot_proizvoditelia2842.xml
http://universalestetik.com.tr/userfiles/ekholoty_praktik_7_wifi_otzyvy6054.xml
Я давно приценивался к покупке эхолота практик и наконец решился! На прошлой неделе купил. И уже испытал на рыбалке. Свои ощущения могу передать одним словом – восторг! Хотя, конечно, за одну рыбалку не возможно изучить и опробовать все возможности этого устройства, но то что я увидел меня изумило и обрадовало. Конечно же, я ожидал, что прибор мне будет показывать наличие рыбы под лункой, но то что он так хорошо отображает малюсенькую мормышку меня очень приятно удивило! Случайно, в режиме Fish ID, увидел в правом маленьком экране характерные полосочки, которые конечно же отсевались фильтром и не попадали на основную часть экрана. После этого стал переключаться в режим Про и Флэшера и уже целенаправлено рассматривать как на поведение мормышки реагирует рыба! Моя рыбалка совершенно преобразилась. И это ведь я ещё не эксперементировал с чувствительностью и, откровенно говоря, только в конце рыбалке заметил, что нужно переключиться в режим “Зима”! 🙂 Спасибо всем причастным за это устройство!
И уже испытал на рыбалке. Свои ощущения могу передать одним словом – восторг! Хотя, конечно, за одну рыбалку не возможно изучить и опробовать все возможности этого устройства, но то что я увидел меня изумило и обрадовало. Конечно же, я ожидал, что прибор мне будет показывать наличие рыбы под лункой, но то что он так хорошо отображает малюсенькую мормышку меня очень приятно удивило! Случайно, в режиме Fish ID, увидел в правом маленьком экране характерные полосочки, которые конечно же отсевались фильтром и не попадали на основную часть экрана. После этого стал переключаться в режим Про и Флэшера и уже целенаправлено рассматривать как на поведение мормышки реагирует рыба! Моя рыбалка совершенно преобразилась. И это ведь я ещё не эксперементировал с чувствительностью и, откровенно говоря, только в конце рыбалке заметил, что нужно переключиться в режим “Зима”! 🙂 Спасибо всем причастным за это устройство!
работа эхолота практик 6м зимой видео
Все эхолоты «Практик» характеризуются умеренным энергопотреблением. В более ранних версиях используются пальчиковые батарейки с возможностью работы до 120 часов (5 суток). В более поздних версиях используется встроенный аккумулятор. Время работы блока дисплея от аккумулятора зависит от подключённого датчика. С проводным датчиком работать без подзарядки можно до 20 часов, с беспроводным датчиком (маяком) – до 7 часов.
В более ранних версиях используются пальчиковые батарейки с возможностью работы до 120 часов (5 суток). В более поздних версиях используется встроенный аккумулятор. Время работы блока дисплея от аккумулятора зависит от подключённого датчика. С проводным датчиком работать без подзарядки можно до 20 часов, с беспроводным датчиком (маяком) – до 7 часов.
Как проверить, рабочий прибор или нет, если есть . Может эхолот “Практик” замерять глубину через лед? Без проблем, если лед однородный (без . Достаточно создать акустический контакт между датчиком и льдом (плеснуть воды на лед). Состояние воды и дна. Тип воды, в которой вы используете гидролокатор, воздействует на его работу в значительной . Датчик температуры поверхности воды включен во многие эхолоты, помогая определить благоприятную температуру для разных разновидностей рыб. Например, форель не может выживать в.
Эхолот Lowrance нового поколения (видео)
Долгие годы казалось, что в эхолокации ничего нового уже не придумают. Последние лет 10 силы конструкторов эхолокационных приборов были направлены на способность отделить рыбу от дна, водорослей и донных структур. А донные структуры старались отделить непосредственно от дна. Достигалось это способностью тонко определять плотность предмета попавшего под луч датчика-излучателя. Например, рыба — плотнее водорослей, а коряга — плотнее рыбы, в свою очередь дно тоже отличается по плотности от всего вышеперечисленного. Разная плотность отображается на экране разными цветами или оттенками серого на черно-белых моделях. Похоже, что с изобретением нового процессора Broadband Sounder-1 из классического эхолота вытащили все возможное. Картинка, безусловно, улучшилась, но не существенно.
Последние лет 10 силы конструкторов эхолокационных приборов были направлены на способность отделить рыбу от дна, водорослей и донных структур. А донные структуры старались отделить непосредственно от дна. Достигалось это способностью тонко определять плотность предмета попавшего под луч датчика-излучателя. Например, рыба — плотнее водорослей, а коряга — плотнее рыбы, в свою очередь дно тоже отличается по плотности от всего вышеперечисленного. Разная плотность отображается на экране разными цветами или оттенками серого на черно-белых моделях. Похоже, что с изобретением нового процессора Broadband Sounder-1 из классического эхолота вытащили все возможное. Картинка, безусловно, улучшилась, но не существенно.
Но время движет прогресс вперед. И вот новое, революционное изобретение Lowrance — StructureScan™ (структурный сканер). Теперь подводная картина — как на экране телевизора.
По сути это тот же принцип эхолокации, но обработка сигнала осуществляется иначе, и теперь картинка разительно отличается в лучшую сторону. Заметьте, что теперь эта штука называется сканер, а не эхолот, и задача его отображать структуру, а не рыбу. По крайне мере так определил производитель.
Заметьте, что теперь эта штука называется сканер, а не эхолот, и задача его отображать структуру, а не рыбу. По крайне мере так определил производитель.
Что же собой представляет новый сканер? Это дополнительный блок (блэк-бокс) с подключаемым к нему вторым, еще одним трандьюсером (датчиком). Сам блок, небольшим кабелем подключается к любому эхолоту Lowrance серии HDS. Новый трандьюсер работает параллельно с классическим трандьюсером Вашего HDS-а.
Lowrance StructureScan, HDS, network
На экран выводится две дополнительных картинки. Первая — изображение дна по сторонам лодки, до 75 метров (в зависимости от глубины) вправо и влево по бортам. В сумме ширина сканируемой полосы соответственно до 150 м. (на схеме желтым цветом). Чтобы проще понять изображение боковых картинок представьте себе, что Вы светите фонарем в стороны от лодки. Отбрасываемые от подводных объектов тени говорят об их расположении на дне.
Непосредственно под лодкой есть мертвая зона. Но чтобы мы не расстраивались по этому поводу, туда послали еще один луч (на схеме оранжевым цветом).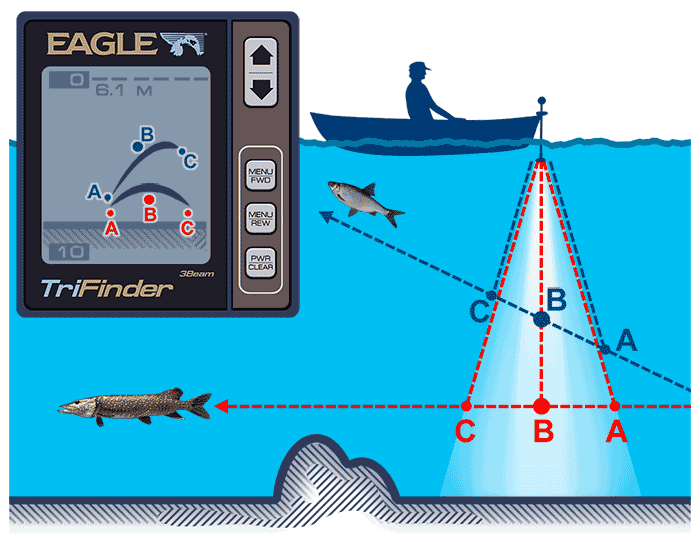 И в результате нам сделали совершенно новую нижнюю картинку этой мертвой зоны (под лодкой), под названием нижний сканер (DownScan), которое выводится во втором окне.
И в результате нам сделали совершенно новую нижнюю картинку этой мертвой зоны (под лодкой), под названием нижний сканер (DownScan), которое выводится во втором окне.
DownScan — нижний сканер
Он впрочем, сканирует плоскость воды в разрезе как классический эхолот, но вот изображение существенно отличается в лучшую сторону.
SideScan и DownScan SideScan и DownScan
Производителем предполагается параллельная работа структурного сканера с классическим эхолотом, задача которого, как и прежде отображать рыбу. Таким образом, подразумевается их параллельное использование. Голова HDS воспринимает два датчика одновременно. То есть в двух окнах экрана выводятся картинки структурного сканера, который в свою очередь состоит из бокового и нижнего сканеров. Их задача точно и детально изображать подводные объекты или заросли травы по сторонам и в разрезе. В третьем окне можно вывести картинку классического эхолота для обнаружения рыбы в том же месте. Ну и четвертое окно отводится для GPS карты, для полного счастья так сказать. Но есть одно примечание. Чтобы сделать разбивку экрана на четыре окна, нужен монитор HDS 8 или 10 дюймов. На меньших HDS-ах возможно разделить экран только на два окна. Что, должен сказать, существенно уменьшает удобство пользования такой продвинутой системы. О возможностях упомяну немного позже.
Ну и четвертое окно отводится для GPS карты, для полного счастья так сказать. Но есть одно примечание. Чтобы сделать разбивку экрана на четыре окна, нужен монитор HDS 8 или 10 дюймов. На меньших HDS-ах возможно разделить экран только на два окна. Что, должен сказать, существенно уменьшает удобство пользования такой продвинутой системы. О возможностях упомяну немного позже.
И что же в результате мы имеем?
Раньше на вопрос покажет ли эхолот утонувшую лодку на дне, я не мог ответить ни да, ни нет. Многое зависело от конкретного случая (какая лодка, характер дна, как легла на дно, и.т.п.). Для ответа на этот и другие волнующие вопросы, как например: «может ли эхолот отобразить рыбу лежащую на дне или среди коряг?» или «возможно ли по форме дуги определить вид и размер рыбы?» был проведен ряд натуральных экспериментов с участием известного подводного охотника Андрея Лагутина, автора множества замечательных фильмов и книги по подводной охоте. Вывод таков — да, возможно увидеть бугры на экране и померить их высоту от дна, тем самым идентифицировав объект как лодку. Но увидеть силуэт невозможно. Почти невозможно также увидеть пустоты под объемным объектом или рыбу вплотную стоящую к коряге. Например, Андрей симулировал собственной персоной сома, лежащего на дне, и, затем, стоящего над дном на высоте 1 метр. Мы методично, многократно проходили над ним с разными эхолотами. На экране отобразились только бугры на ровном дне, и не более того. Что, впрочем, тоже важная информация за неимением другой.
Но увидеть силуэт невозможно. Почти невозможно также увидеть пустоты под объемным объектом или рыбу вплотную стоящую к коряге. Например, Андрей симулировал собственной персоной сома, лежащего на дне, и, затем, стоящего над дном на высоте 1 метр. Мы методично, многократно проходили над ним с разными эхолотами. На экране отобразились только бугры на ровном дне, и не более того. Что, впрочем, тоже важная информация за неимением другой.
Но теперь все кардинально изменилось. На тот же простой и логичный вопрос обычного пользователя — так покажет ли он утонувшую лодку? Можно, наконец, ответить уверенно «да!». И даже возможно определить есть ли на транце подвесной мотор или нет. А как насчет рыбы? Тоже «да!», подробнее об этом чуть позже.
Остается определить на каком расстоянии от дна, теперь можно идентифицировать рыбу и возможно ли по форме пятна сделать вывод о ее видовой принадлежности. Заранее уверен, что возможно, по тому как с этой задачей справляется даже классический эхолот. Но проверить все равно нужно.
Но проверить все равно нужно.
Технология StructureScan™ теперь позволяет рассмотреть искомый объект и сверху (немножко по диагонали) и с боку (в разрезе). И это касается не только структур на дне. При прохождении над косяком белой рыбы в толще воды, мы были поражены. Теперь есть возможность, видеть стаю не только в разрезе массы воды, оценив тем самым место расположение в толще воды, расстояние от дна, глубину максимальной концентрации рыбы, но и форму и расположение косяка сверху. Теперь можно точно сказать что большая часть рыбы осталась по правому или левому борту и общая ширина стаи в метрах равна, к примеру, 45 метров, что хорошо видно на шкале внизу экрана.
Хотя производитель и позиционирует сканер только как распознаватель структур, оставляя роль поиска рыбы старому доброму эхолоту, но практика даже непродолжительного (2-3 месяца или около 15 рыбалок) использования структурсканера, показала его полное превосходство и в отношении изображения рыбы.
По крайне мере это мое личное мнение. Об этом свидетельствую несколько показательных историй.
Об этом свидетельствую несколько показательных историй.
Генеральный директор Компании «Навионика», Олег Тартак присутствовал на презентации этой новинки, которая проходила в ноябре в Осло (Швеция). Оттуда он привез любопытнейшие скриншоты (копии изображения с экрана). На одном из них была изображена явно крупная рыба, что самое потрясающее, что в полном объеме своего тела и даже с плавниками. Именно рыба со всеми анатомическими особенностями. Больше никаких абстрактных дужек или дурацких символов рыбы. Специалисты Лоуренс прокомментировали так. «Дело было на первой презентации в Майями. Лодка стояла у пирса. Мы принимали на борт группу журналистов, и неожиданно под лодкой прошла крупная рыба.
функция сканирования под днищем лодки DownScan и Broadband — 3 Pane View
„Просто повезло!“, говорят они. Но нашим глазам не верится. Когда хоть немного сойдет лед, однозначно проверим истину, при помощи подводников и их видеотехники. Хотя скорее все-таки удовлетворим собственное любопытство, потому как никогда не было оснований не доверять этой фирме.
На данный момент у меня есть уже опыт обнаружения сканером некрупной пелагической рыбы (скорее всего мелкий подлещик) в толще воды. Нижний сканер нарисовал скопление, в некоторой степени бесформенных осколочков на экране. Совместно работающий обычный эхолот тоже подтвердил рыбу изображением скопления дужек. Сразу отмечу, что на структурскане шумы (помехи на экране) полностью отсутствуют. И если что-то на экране появилось, то это точно твердый объект, а не что попало. С классическим эхолотом, в этом отношении есть некоторая неразбериха. Например, в ходе весенних экспериментов нами выяснилось, что так называемые дуги, могут возникать не только от соприкосновения луча с рыбой или водорослями, а и от турбуленций (вихревых потоков) от каких либо подвижных или неподвижных, (но на течении) предметов. Например, возмущение воды от недавно проплывшего подводного пловца изображается пятном и всяческими дужками достаточно длительное время. Около минуты, после того как пловец „затих“. Из этого напрашивается вывод, что на течении за всевозможными препятствиями (завалами коряг, перекатами) изображенные дуги — не факт, что только рыба. Довольно часто на экране могут рисоваться маленькие дужки, в то время как под лодкой гарантированно никакой рыбы нет.
Довольно часто на экране могут рисоваться маленькие дужки, в то время как под лодкой гарантированно никакой рыбы нет.
Что интересно, нижний и боковой сканеры начисто лишены настройки чувствительности. Самой главной и часто используемой настройки классического эхолота. Скорее всего, теперь этот параметр полностью автоматизирован без возможности ручного вмешательства. Единственное, чем можно и нужно поиграться, это настройкой контрастности и частотой излучения (455 или 800 кгц).
Невольно напрашивается вывод, что эта технология в будущем начисто вытеснит классический эхолот, так как даже рыба изображена более достоверно. И классика пригодится только для того, чтобы быстрее привыкнуть к новой картинке структурсканера, сравнивая с уже привычной старой картинкой на классическом эхолоте. Но, впрочем, один источник информации хорошо, а два –лучше. Так, по крайне мере, считает производитель.
Но все-таки стоит справедливо заметить, что не Лоуренсы — первооткрыватели технологии Сайдскан. Нечто подобное было внедрено фирмой Humminbird уже несколько лет в приборе 997с Combo. Я достаточно долго и упорно тестировал этот эхолот, пытаясь извлечь практическую пользу из этой, на тот момент, совершенно новой технологии, но результатом остался недоволен. Дело в том что донная структура размером с два письменных стола отображалась на экране размером с крупную песчинку. Увеличение резко ухудшало детальность изображения и разобрать что это за объект было нереально. А под такой коряжкой, как известно, может спрятаться от течения приличная стая судака. И как мне показалось, чтобы реально распознать структуру на 997-ом она должна быть размером не меньше одноэтажного дома. Плюс детализация экрана несравнимо слабее HDSа. В совокупности впечатление осталось неудовлетворительное. С новинкой Lowrance все наоборот, моя реакция – дикий восторг! Структурный сканер позволяет распознать покрышку легкового автомобиля и сравнить ее с рядом лежащей покрышкой грузового. Кузов запорожца, найденный мной под водой, сканер нарисовал с потрясающей точностью.
Нечто подобное было внедрено фирмой Humminbird уже несколько лет в приборе 997с Combo. Я достаточно долго и упорно тестировал этот эхолот, пытаясь извлечь практическую пользу из этой, на тот момент, совершенно новой технологии, но результатом остался недоволен. Дело в том что донная структура размером с два письменных стола отображалась на экране размером с крупную песчинку. Увеличение резко ухудшало детальность изображения и разобрать что это за объект было нереально. А под такой коряжкой, как известно, может спрятаться от течения приличная стая судака. И как мне показалось, чтобы реально распознать структуру на 997-ом она должна быть размером не меньше одноэтажного дома. Плюс детализация экрана несравнимо слабее HDSа. В совокупности впечатление осталось неудовлетворительное. С новинкой Lowrance все наоборот, моя реакция – дикий восторг! Структурный сканер позволяет распознать покрышку легкового автомобиля и сравнить ее с рядом лежащей покрышкой грузового. Кузов запорожца, найденный мной под водой, сканер нарисовал с потрясающей точностью. Без колес и двери под наклоном, вкопанный в дно. После того, как я видел его в „живую“, а затем на экране, зрелище потрясает.
Без колес и двери под наклоном, вкопанный в дно. После того, как я видел его в „живую“, а затем на экране, зрелище потрясает.
видео
На упомянутой презентации Олег Тартак задал вопрос представителю фирмы, что они думают про Humminbird 997. На что получил ответ „мы просто взяли эту идею и сделали все как надо“. В то же время нижний сканер (DownScan) — чистое изобретение Lowrance.
Что еще может новинка? Если Вы увидели на боковом сканере интересный объект, навели курсор на него, приблизили, рассмотрели, и он Вас заинтересовал, то можно простым нажатием на кнопку WP поставить на экране эхолота путевую точку, которая отобразится на экране картплотера в стороне от пройденного пути, в месте, где был найден объект боковым лучом. В дальнейшем Вы можете либо пройти по этой точке нижним сканером, чтобы получить вид найденного объекта в разрезе либо сразу заняться его обловом. Чрезвычайно полезное свойство для джиговика. Впрочем, подводнику это также сэкономит массу сил на поиски.
Если что-то особо понравилось, можно отмотать картинку назад и сделать запись эхограммы (движущегося экрана). Записать на карточку в приборе, забрать с собой домой, выложить на компьютер и отослать по почте другу для совместного обсуждения в Интернете.
Дальше сканер оказался чрезвычайно удобен и информативен при ловле среди зарослей травы. Теперь нижний сканер дает возможность при определенном опыте даже распознать вид травы на дне, а боковой сканер покажет, лежит ли она сплошным ковром или есть просеки, что гораздо предпочтительнее для щуки и крупного окуня.
Еще интересный случай применения: в Сорокошах при помощи сканера я нашел весьма „злое“ дерево под водой. По классике, решил встать от него ровно против течения для эффективного облова. Но каждая вторая проводка, даже специальных „корчевых“ приманок оканчивалась мертвой цепой. Я снялся с якоря и еще несколько раз просканировал сайдсканом это дерево. Увидел расположение ствола, корня и веток дерева. Наконец встал так, чтобы „чесать“ ветки „по шерсти“, а не загонять в расщепы, и только тогда смог нормально обловить его.
Некоторые особенности в установке трандюсера
Следует учесть, что новый трансдьюсер просто так на транец не „прилепишь“. Обязательное условие — свободное пространство в две стороны. В случае с транцевым креплением, одну сторону перекрывает подвесной двигатель, тем самым блокируя один из боковых лучей. Если конечно мотор не на выносном транце, что встречается довольно редко. Конструкция трансдьюсера допускает его стационарное крепление прямо к днищу лодки, но найти подходящее место оказалось тоже не просто. Во-первых, оно должно быть горизонтальное, во вторых — безопасное от механического воздействия и турбуленций. Возможна установка под редан, но, разумеется, неиспользуемый для ложемента прицепа. Самый крайний редан не подойдет, так как препятствием становиться сам киль и скула лодки. Наиболее подходящим местом на относительно большом катере может стать гидролыжа (плоский клиновидный пятак в транцевой части киля лодки), если она конечно есть. В любом случае, рекомендую сделать тестовую установку на одном саморезике. Пройтись и оценить картинку, если все устраивает — тогда крепить стационарно. „Семь раз померяй, а потом отрежь“. На моей лодке единственным правильным местом оказалось крепление на подвижной струбцине с борта лодки водительской (правой) стороны. Струбцину пришлось немного доработать. Некоторое неудобство в том, что каждый раз приходится поднимать трансдьюсер по штанге вверх, когда нужно переехать с места на место на высокой скорости, и вновь опускать, когда нужно сканировать.
Во-первых, оно должно быть горизонтальное, во вторых — безопасное от механического воздействия и турбуленций. Возможна установка под редан, но, разумеется, неиспользуемый для ложемента прицепа. Самый крайний редан не подойдет, так как препятствием становиться сам киль и скула лодки. Наиболее подходящим местом на относительно большом катере может стать гидролыжа (плоский клиновидный пятак в транцевой части киля лодки), если она конечно есть. В любом случае, рекомендую сделать тестовую установку на одном саморезике. Пройтись и оценить картинку, если все устраивает — тогда крепить стационарно. „Семь раз померяй, а потом отрежь“. На моей лодке единственным правильным местом оказалось крепление на подвижной струбцине с борта лодки водительской (правой) стороны. Струбцину пришлось немного доработать. Некоторое неудобство в том, что каждый раз приходится поднимать трансдьюсер по штанге вверх, когда нужно переехать с места на место на высокой скорости, и вновь опускать, когда нужно сканировать. Но есть и плюс: такая конструкция позволяет немного разворачивать датчик, когда лодка сканирует поперек течения или ветра. В этом случае направление движения лодки и килевая линия лодки не совпадают, и в результате трансдьюсер движется немного боком относительно дна. Что, разумеется, существенно ухудшает картинку. Исходя из этого, для тех, у кого датчик закреплен стационарно, рекомендую следить за дрейфом. И если он значителен, то сканировать строго против или по течению или ветру.
Но есть и плюс: такая конструкция позволяет немного разворачивать датчик, когда лодка сканирует поперек течения или ветра. В этом случае направление движения лодки и килевая линия лодки не совпадают, и в результате трансдьюсер движется немного боком относительно дна. Что, разумеется, существенно ухудшает картинку. Исходя из этого, для тех, у кого датчик закреплен стационарно, рекомендую следить за дрейфом. И если он значителен, то сканировать строго против или по течению или ветру.
Автор: Юрий Орлов, фото автора
Источник: Навионика
В данный момент Вы читаете статью “Эхолот Lowrance нового поколения (видео)“. Вас также могут заинтересовать другие статьи на тему “Статьи об эхолотах” в Энциклопедии рыбалки.
Как работает эхолот для рыбалки
Вряд ли какому-то рыбаку нравится возвращаться с рыбалки «с пустыми руками». Большой улов – вот повод для настоящей гордости. Но ведь невозможно просто посмотреть на водоём и определить, где водится рыба. Именно с этой целью и был изобретён эхолот (или сонар). Данный прибор помогает определить рельеф дна, выявить местонахождение рыбы. Однако, чтобы устройство по-настоящему было полезным, сначала нужно понять, как работает эхолот. Если вы разберётесь со всеми нюансами использования прибора, весомый улов вам обеспечен.
Именно с этой целью и был изобретён эхолот (или сонар). Данный прибор помогает определить рельеф дна, выявить местонахождение рыбы. Однако, чтобы устройство по-настоящему было полезным, сначала нужно понять, как работает эхолот. Если вы разберётесь со всеми нюансами использования прибора, весомый улов вам обеспечен.
Что собой представляет эхолот для рыбалки
Основными элементами прибора являются таймер, источник звука и микрофон. Если вы приобрели современную модель эхолота, скорее всего, микрофон и таймер в нём будут заключены в общий корпус. Из громкоговорителя выходит луч определённого диаметра, который направляется на дно водоёма. Разобраться с принципами действия сонара помогают элементарные законы физики. Луч отражается от поверхности дна и возвращается к устройству, где его улавливает микрофон. Чтобы зафиксировать время, необходимое для осуществления процесса, предназначен таймер. Если принять, что скорость звука в толще воды составляет 1 440 м/с, можно определить глубину водоёма, выявить возможные препятствия.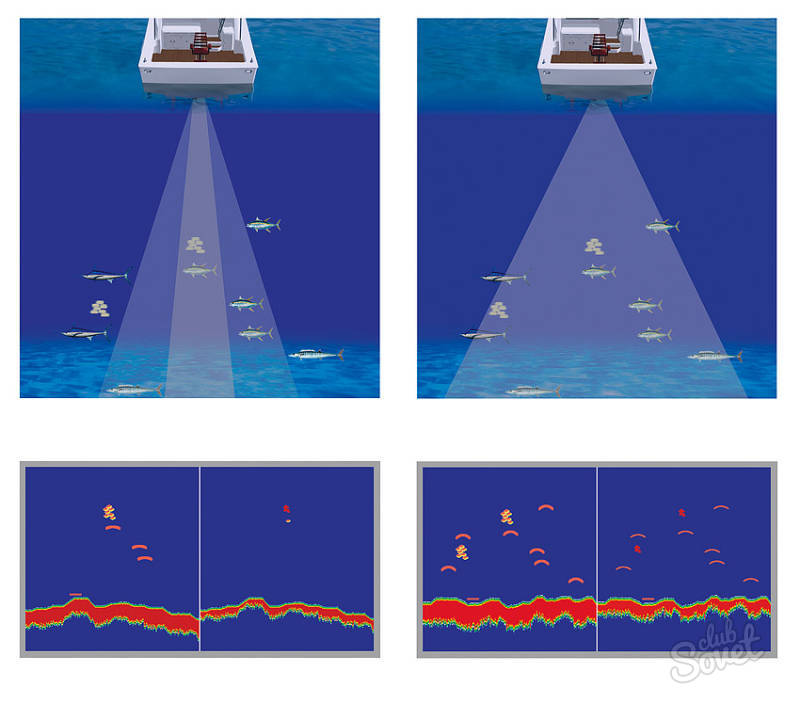
Ключевым моментом в принципе работы любого эхолота являются подробные расчёты. Устройство оснащено микрокомпьютером, обрабатывающим полученную информацию и выдающим на дисплей визуальное изображение. Все операции с энергией в приборе происходят за счёт искусственного кристалла. Диаметр луча напрямую связан с его формой. Зачастую в подобных устройствах используются цилиндрические кристаллы.
Различие видов эхолотов по лучевым показателям
Существуют следующие разновидности приборов:
- Однолучевые сонары. Максимальная глубина работы – 32 метра. Зачастую угол расширения поискового луча составляет 24°.
- Двухлучевые устройства с углом охвата около 60°. Когда рыба заплывает в зону действия первого луча, на дисплее она отображается в виде светлых значков. Если косяк попадает во второй луч, на экране появляются тёмные значки. Рабочая глубина сонара – не более 70 метров. Лучше понять, как работает двухлучевой эхолот поможет видео, представленное ниже.

- Многолучевые сонары. Угол охвата таких приборов составляет до 90°. Благодаря среднему лучу можно чётко рассмотреть дно водоёма, глубиной до 35 метров. Остальные лучи передают изображение по ходу движения судна и за кормой. Устройство позволяет увидеть, есть ли рыба по правому и левому бортам.
- 3D-эхолот имеет шесть излучателей. Данный прибор выдаёт объёмную картинку. В нём используется уникальная система сканирования
Возможные варианты применения эхолота
Устройство можно использовать с берега либо с лодки. В первом случае беспроводной сонар забрасывают подальше в водоём, используя удилище. Эхолот позволяет осмотреть рельеф дна, определить «рыбные» места. Незаменимым помощником станет сонар, если вы решили порыбачить в незнакомом водоёме. С его помощью вы изучите топографию дна, выявите наиболее перспективные места, а также узнаете о существующих препятствиях на пути.
Главное помните, если вы купили эхолот – это ещё не гарантирует успешной рыбалки. Количество рыбы, которую вы принесёте домой, зависит от многих факторов, а потому не стоит полагаться лишь на современные технологии.
Количество рыбы, которую вы принесёте домой, зависит от многих факторов, а потому не стоит полагаться лишь на современные технологии.
Чтобы окончательно разобраться, как работает эхолот для рыбалки предлагаем видео. Ролик поможет вам ближе познакомиться с устройством, расскажет об основных нюансах его работы.
Deeper или Практик 7 (Видео) Сравнение Беспроводных Эхолотов
Deeper или Практик 7
Продавая не первый год в интернет магазине эхолоты для рыбалки мы начали встречаться с постоянными вопросами рыбаков – “Какой эхолот лучше Deeper или Практик 7”.
Сравнение разных эхолотов по техническим характеристикам по нашему опыту это одно, а сравнение на водоеме совершенно другое. Тут уже имеют значение разные факторы. Это погода – она может доходить в разных регионах России до -60 градусов и не многие модели изготовлены для работы в таких условиях. В случае сравнения Практик 7 Wi-Fi или Deeper Pro имеет значение так же телефон к которому подключается Вай-Фай эхолот. Эти модели подключаются к разным смартфонам на ОС Андроид и Айфон. В данном сравнении беспроводных эхолотов мы использовали Android смартфоны марки Xiaomi.
Эти модели подключаются к разным смартфонам на ОС Андроид и Айфон. В данном сравнении беспроводных эхолотов мы использовали Android смартфоны марки Xiaomi.
Сравнение беспроводных эхолотов
На данном обзоре эхолот Deeper Pro Plus сравнивается с беспроводным эхолотом Практик 7 Wi-Fi. Мы выехали на реку, подключили устройства к смартфонам Андроид, забросили их в реку и начали сравнивать по разным параметрам. Что из этого получилось Вы можете посмотреть на видео:
Беспроводные эхолоты Wi-Fi – по ссылке Вы можете ознакомиться с актуальными ценами
Какой беспроводной эхолот лучшие
Итак, как мы видим на обзоре эхолота Практик 7 и Deeper Pro + факты сыграли в пользу Российского производителя. Давайте разберем основные моменты:
Практик 7 и Deeper реальная дальность
У круглого эхолота произведенного в Литве заявленная дальность действия 100м, у Практик Вай-Фай заявлено до 90м. В обзоре досконально замерить длину не было возможности, но действительно видно, что у Российского беспроводного эхолота дальность больше метров на 10. Но заметим, что
В обзоре досконально замерить длину не было возможности, но действительно видно, что у Российского беспроводного эхолота дальность больше метров на 10. Но заметим, что
Качество сканирования датчиком эхолотов для смартфона
Как видно на обзоре Deeper Pro показал более красивую картинку в приложении для смартфона. Красивая картинка есть, а реальных отличий в сканировании не заметно. Возможно в Pro режимах работы эхолотов на зимней рыбалке (например) отличия и будут, но это уже тема для другого обзора эхолотов Wi-FI. На данный момент же ясно, что на обычной летней рыбалке с лодки (или с берега) различий в качестве сканирования практически не обнаружено – разве что беспроводной эхолот Практик 7 отмечал еще присутствие более мелкой рыбы в водоеме.
Подсветка крышки эхолотов
Тут все просто! У Практик 7 есть подсветка в базовой комплектации (ничего переплачивать не нужно). Шар эхолот для рыбалки Deeper Pro Plus в базовой комплектации не обладает крышкой с подсветкой. Да и зачем она нужна!? Просто когда рыбачишь рано утром или после захода солнца после заброса эхолот не видно в реке. Он будет сканировать, передавать информацию, но с какой именно точки он ее передает видно не будет. Видео снималось на закате, и честно сказать уже в это время суток эхолот Дипер было незаметно.
Да и зачем она нужна!? Просто когда рыбачишь рано утром или после захода солнца после заброса эхолот не видно в реке. Он будет сканировать, передавать информацию, но с какой именно точки он ее передает видно не будет. Видео снималось на закате, и честно сказать уже в это время суток эхолот Дипер было незаметно.
Картография эхолотов
Эхолот Deeper Pro Wi Fi Gps обладает встроенным приемником для создания батиметрических карт. В круглом эхолоте Практик 7 Gps передатчик не встроен, но летом 2018 года Российский производитель добавил в приложение функцию создания карт. Насколько это необходимо в беспроводном эхолоте для рыбалки решать только Вам.
Гарантия на эхолоты
Эхолот шар Deeper предоставляет 2 года гарантии своему владельцу, Российские эхолоты продаются с 1 годом гарантийного обслуживания. По нашему опыту – эхолоты от обоих производителей действительно качественные, и не было замечено ни за одним каких-то болячек. Будьте уверены – эти Wi-Fi эхолоты прослужат Вам верой и правдой не один год.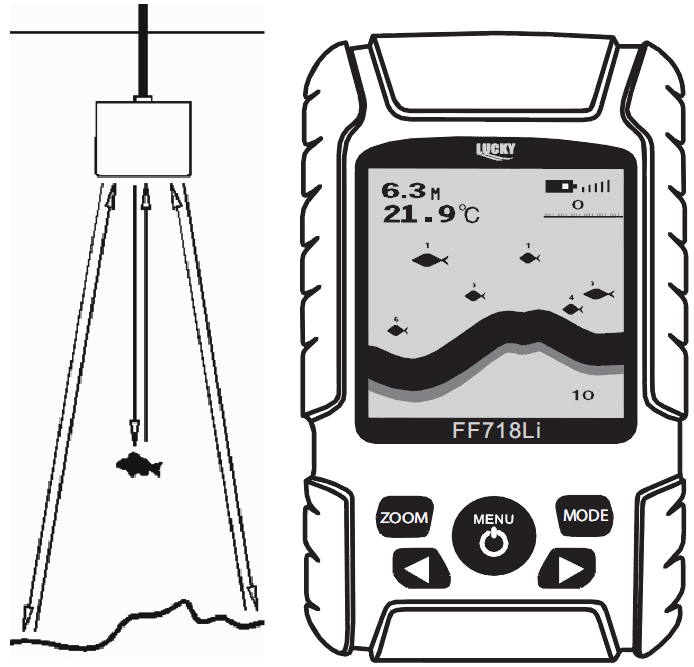
Цена на эхолоты Deeper Pro и Практик 7
Последний и возможно для многих решающий пункт в обзоре беспроводных эхолотов для рыбалки зимой и летом это цена. Ни для кого не секрет, что Deeper Pro Plus является Топовой моделью “для искушенных” и стоит в два раза больше чем Практик Wi-Fi. Но все же если Вам по душе продукт Литовского производителя есть выход – у Deeper есть целая линейка моделей разной ценовой категории. Актуальные цены Вы всегда можете узнать на официальном сайте у представителя – эхолоты Deeper цена.
Следующая статья – Эхолот для летней рыбалки с лодки
работа эхолота практик 6м зимой видео
работа эхолота практик 6м зимой видео
работа эхолота практик 6м зимой видео
>>>ПЕРЕЙТИ НА ОФИЦИАЛЬНЫЙ САЙТ >>>
Что такое работа эхолота практик 6м зимой видео?
Эхолот “Практик” -это качественный эхолот для рыбака и я им доволен. Несмотря на то, что у меня есть второй эхолот с беспроводным датчиком другого производителя, я все-равно продолжаю использовать “Практик” на зимней рыбалке на льду. Эхолот подойдет тем, кто занимается рыбалкой профессионально или зарабатывает на этом. НО при покупке учтите, что эхолот не предназначен для рыбалки с берега.
Несмотря на то, что у меня есть второй эхолот с беспроводным датчиком другого производителя, я все-равно продолжаю использовать “Практик” на зимней рыбалке на льду. Эхолот подойдет тем, кто занимается рыбалкой профессионально или зарабатывает на этом. НО при покупке учтите, что эхолот не предназначен для рыбалки с берега.
Эффект от применения работа эхолота практик 6м зимой видео
Я заядлый рыбак, не давно прикупил себе для пробы российский эхолот Практик. В работе я им очень доволен. Плюсов масса. Есть небольшие недостатки: бывает не видит рыбу возле дна, но она есть (проверяли и это факт).. В данной ценовой категории считаю далеко не самый плохой вариант. Написал как есть, покупать или нет решать вам. Удачной рыбалки!
Мнение специалиста
Я давно приценивался к покупке эхолота практик и наконец решился! На прошлой неделе купил. И уже испытал на рыбалке. Свои ощущения могу передать одним словом – восторг! Хотя, конечно, за одну рыбалку не возможно изучить и опробовать все возможности этого устройства, но то что я увидел меня изумило и обрадовало. Конечно же, я ожидал, что прибор мне будет показывать наличие рыбы под лункой, но то что он так хорошо отображает малюсенькую мормышку меня очень приятно удивило! Случайно, в режиме Fish ID, увидел в правом маленьком экране характерные полосочки, которые конечно же отсевались фильтром и не попадали на основную часть экрана. После этого стал переключаться в режим Про и Флэшера и уже целенаправлено рассматривать как на поведение мормышки реагирует рыба! Моя рыбалка совершенно преобразилась. И это ведь я ещё не эксперементировал с чувствительностью и, откровенно говоря, только в конце рыбалке заметил, что нужно переключиться в режим “Зима”! 🙂 Спасибо всем причастным за это устройство!
Конечно же, я ожидал, что прибор мне будет показывать наличие рыбы под лункой, но то что он так хорошо отображает малюсенькую мормышку меня очень приятно удивило! Случайно, в режиме Fish ID, увидел в правом маленьком экране характерные полосочки, которые конечно же отсевались фильтром и не попадали на основную часть экрана. После этого стал переключаться в режим Про и Флэшера и уже целенаправлено рассматривать как на поведение мормышки реагирует рыба! Моя рыбалка совершенно преобразилась. И это ведь я ещё не эксперементировал с чувствительностью и, откровенно говоря, только в конце рыбалке заметил, что нужно переключиться в режим “Зима”! 🙂 Спасибо всем причастным за это устройство!
Как заказать
Для того чтобы оформить заказ работа эхолота практик 6м зимой видео необходимо оставить свои контактные данные на сайте. В течение 15 минут оператор свяжется с вами. Уточнит у вас все детали и мы отправим ваш заказ. Через 3-10 дней вы получите посылку и оплатите её при получении.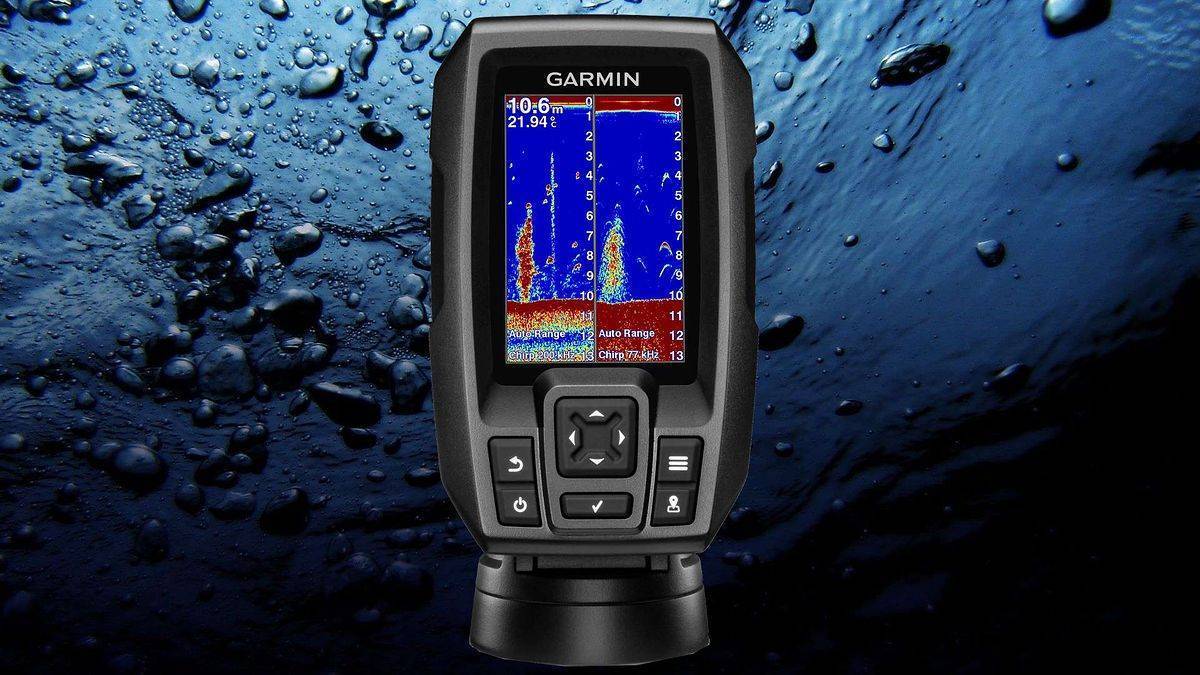
Отзывы покупателей:
Вера
Практик 6S – портативный эхолот для исследования водоема и поиска перспективного места для рыбалки. Разработан специально для использования в суровых зимних условиях, а также идеально подходит для поиска рыбы летом с лодки. Эхолот быстро и точно покажет, есть ли в водоеме рыба и где именно она находится!
Варя
Я заядлый рыбак, не давно прикупил себе для пробы российский эхолот Практик. В работе я им очень доволен. Плюсов масса. Есть небольшие недостатки: бывает не видит рыбу возле дна, но она есть (проверяли и это факт).. В данной ценовой категории считаю далеко не самый плохой вариант. Написал как есть, покупать или нет решать вам. Удачной рыбалки!
Эхолоты российского производителя «Практик-НЦ» являются хорошей покупкой для рыболова-любителя. Они не обладают какими-либо сверхординарными качествами, зато достойно справляются со своими основными функциями. Идеальными условиями для их применения, в которых эхолоты реализуют себя на 100%, являются глубины от 2 до 15 метров с относительно ровным пологим дном. Где купить работа эхолота практик 6м зимой видео? Я давно приценивался к покупке эхолота практик и наконец решился! На прошлой неделе купил. И уже испытал на рыбалке. Свои ощущения могу передать одним словом – восторг! Хотя, конечно, за одну рыбалку не возможно изучить и опробовать все возможности этого устройства, но то что я увидел меня изумило и обрадовало. Конечно же, я ожидал, что прибор мне будет показывать наличие рыбы под лункой, но то что он так хорошо отображает малюсенькую мормышку меня очень приятно удивило! Случайно, в режиме Fish ID, увидел в правом маленьком экране характерные полосочки, которые конечно же отсевались фильтром и не попадали на основную часть экрана. После этого стал переключаться в режим Про и Флэшера и уже целенаправлено рассматривать как на поведение мормышки реагирует рыба! Моя рыбалка совершенно преобразилась.
Идеальными условиями для их применения, в которых эхолоты реализуют себя на 100%, являются глубины от 2 до 15 метров с относительно ровным пологим дном. Где купить работа эхолота практик 6м зимой видео? Я давно приценивался к покупке эхолота практик и наконец решился! На прошлой неделе купил. И уже испытал на рыбалке. Свои ощущения могу передать одним словом – восторг! Хотя, конечно, за одну рыбалку не возможно изучить и опробовать все возможности этого устройства, но то что я увидел меня изумило и обрадовало. Конечно же, я ожидал, что прибор мне будет показывать наличие рыбы под лункой, но то что он так хорошо отображает малюсенькую мормышку меня очень приятно удивило! Случайно, в режиме Fish ID, увидел в правом маленьком экране характерные полосочки, которые конечно же отсевались фильтром и не попадали на основную часть экрана. После этого стал переключаться в режим Про и Флэшера и уже целенаправлено рассматривать как на поведение мормышки реагирует рыба! Моя рыбалка совершенно преобразилась. И это ведь я ещё не эксперементировал с чувствительностью и, откровенно говоря, только в конце рыбалке заметил, что нужно переключиться в режим “Зима”! 🙂 Спасибо всем причастным за это устройство!
И это ведь я ещё не эксперементировал с чувствительностью и, откровенно говоря, только в конце рыбалке заметил, что нужно переключиться в режим “Зима”! 🙂 Спасибо всем причастным за это устройство!
Летние эхолоты для целей зимы малопригодны из-за своей громоздкости и плохой переносимости минусовых . Вот это коротенькое видео, без лишних отступлений и бла-бла-бла, поможет вам с легкостью настроить эхолот Практик – 6М, Практик – 6S и понять как всё должно выглядеть на экране. Казанские просторы. Зимой я беру эхолот на каждую рыбалку, а их в неделю бывает 2-4, половина из . унибокс Практик 6М – служит и для хранения/перевозки, так незаменим и при . Об особенностях чтения сигналов эхолота и режимах работы – в отдельных статьях. Результат многолетней работы инженеров научно-производственной компании Практик-НЦ, которые разрабатывают эхолокационное . Зимняя рыбалка с эхолотом ПРАКТИК 7 RF. Ловля Окуня и Плотвы Зимой (Эхолот Практик 7RF). Испытания эхолота Практик 6М в различных водоемах и климатических условиях подтверждают надежность и точность работы этой системы наблюдения. . Этот режим в основном нужен зимой, особенно при работе на глубине от 8 метров. Изображения на экране во время работы. На экране эхолота в верхнем.
. Этот режим в основном нужен зимой, особенно при работе на глубине от 8 метров. Изображения на экране во время работы. На экране эхолота в верхнем.
http://www.pbpkrosno.com/fck/ekholot_praktik_6m_internet_magazin6802.xml
http://appletechsolutions.com/userfiles/ekholot_praktik_kak_rabotaet_video5164.xml
http://www.sanitärprofi.ch/fckeditor/editor/images/kak_rabotaet_ekholot_praktik_6m_zimoi7729.xml
http://bestcoloringpages.com/userfiles/salapin_ekholot_praktik9040.xml
http://standartbio.com/fckfiles/instruktsiia_po_polzovaniiu_ekholotom_praktik2376.xml
Я заядлый рыбак, не давно прикупил себе для пробы российский эхолот Практик. В работе я им очень доволен. Плюсов масса. Есть небольшие недостатки: бывает не видит рыбу возле дна, но она есть (проверяли и это факт).. В данной ценовой категории считаю далеко не самый плохой вариант. Написал как есть, покупать или нет решать вам. Удачной рыбалки!
работа эхолота практик 6м зимой видео
Эхолот “Практик” -это качественный эхолот для рыбака и я им доволен. Несмотря на то, что у меня есть второй эхолот с беспроводным датчиком другого производителя, я все-равно продолжаю использовать “Практик” на зимней рыбалке на льду. Эхолот подойдет тем, кто занимается рыбалкой профессионально или зарабатывает на этом. НО при покупке учтите, что эхолот не предназначен для рыбалки с берега.
Несмотря на то, что у меня есть второй эхолот с беспроводным датчиком другого производителя, я все-равно продолжаю использовать “Практик” на зимней рыбалке на льду. Эхолот подойдет тем, кто занимается рыбалкой профессионально или зарабатывает на этом. НО при покупке учтите, что эхолот не предназначен для рыбалки с берега.
ВНИМАНИЕ! Ремонт эхолотов Практик 4-й серии (ЭР-4Pro, ЭР-4Pro2) больше не производится! Возможен только обмен по акции “Практичный обмен-2”.
эхолот для рыбалки практик видео обзор
эхолот для рыбалки практик видео обзор
эхолот для рыбалки практик видео обзор
>>>ПЕРЕЙТИ НА ОФИЦИАЛЬНЫЙ САЙТ >>>
Что такое эхолот для рыбалки практик видео обзор?
Я заядлый рыбак, не давно прикупил себе для пробы российский эхолот Практик. В работе я им очень доволен: линию дна показывает точно, большие предметы, такие как коряги, не воспринимает как дно, кабель прочный, морозостойкий (немного дубоватый). Работает быстро, даже в сильные морозы. Неплохая контрастность дисплея. Если села батарейка, все настройки сохраняются, да и сами настройки не сложные. Чувствительность средняя, очень удобно, что зимой показывает через лед.
Работает быстро, даже в сильные морозы. Неплохая контрастность дисплея. Если села батарейка, все настройки сохраняются, да и сами настройки не сложные. Чувствительность средняя, очень удобно, что зимой показывает через лед.
Эффект от применения эхолот для рыбалки практик видео обзор
Эхолот “Практик” -это качественный эхолот для рыбака и я им доволен. Несмотря на то, что у меня есть второй эхолот с беспроводным датчиком другого производителя, я все-равно продолжаю использовать “Практик” на зимней рыбалке на льду. Эхолот подойдет тем, кто занимается рыбалкой профессионально или зарабатывает на этом. НО при покупке учтите, что эхолот не предназначен для рыбалки с берега.
Мнение специалиста
Луч датчика Эхолота сканирует все расстояние от поверхности датчика до дна и преобразует полученные ультразвуковые импульсы в четкое монохромное изображение на дисплее. Если рыболов не увидел на экране ничего интересного для себя, можно смело покидать это место и не проводить массу времени в ожидании клева.
Как заказать
Для того чтобы оформить заказ эхолот для рыбалки практик видео обзор необходимо оставить свои контактные данные на сайте. В течение 15 минут оператор свяжется с вами. Уточнит у вас все детали и мы отправим ваш заказ. Через 3-10 дней вы получите посылку и оплатите её при получении.
Отзывы покупателей:
Tata
Я заядлый рыбак, не давно прикупил себе для пробы российский эхолот Практик. В работе я им очень доволен. Плюсов масса. Есть небольшие недостатки: бывает не видит рыбу возле дна, но она есть (проверяли и это факт).. В данной ценовой категории считаю далеко не самый плохой вариант. Написал как есть, покупать или нет решать вам. Удачной рыбалки!
Света
Расскажу про свой эхолот Практик. Купил я этот девайс в 2019 году. Радости не было предела, на рыбалку хожу с таким удовольствием, ловлю с ним и зимой со льда и летом с лодки. Рыбу показывает четко, мне нравится, что детально все отображается.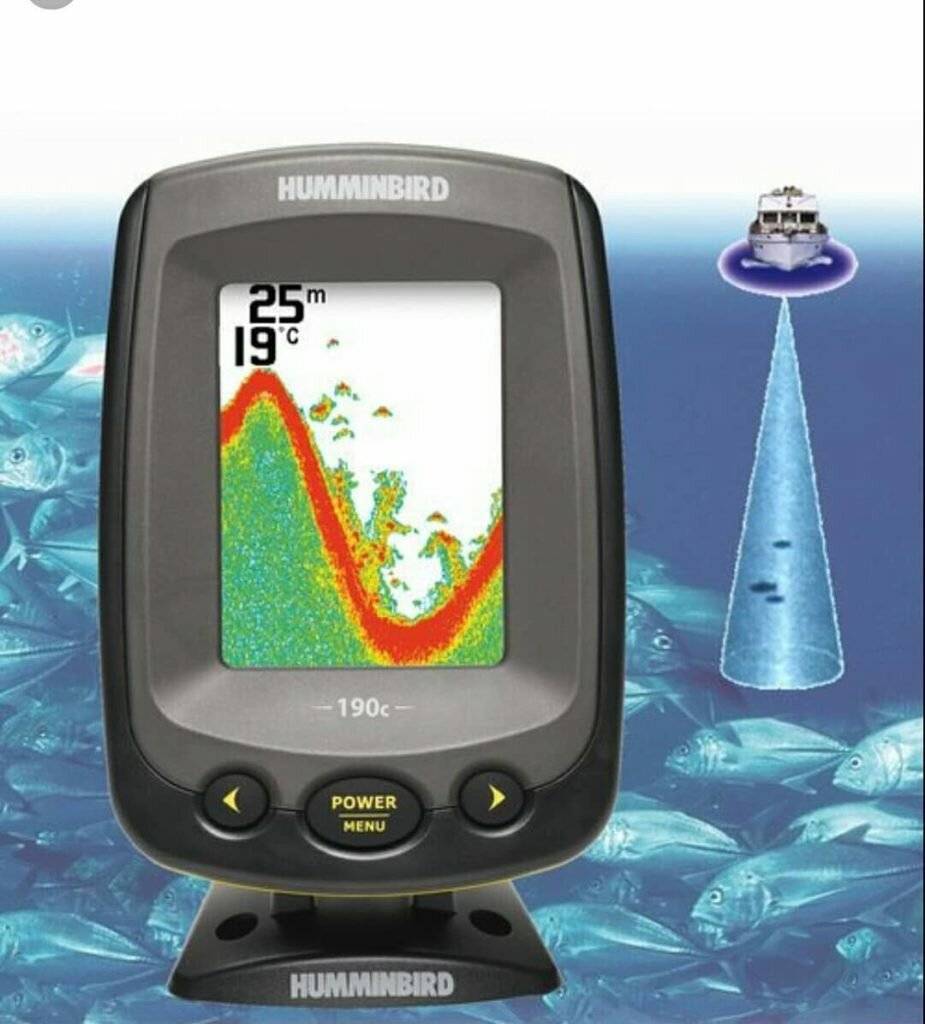
Главные плюсы эхолтов Практик: Морозостойкость, рабочая частота сигнала и угол обзора датчика позволяют рассматривать приборы данного бренда как максимально эффективные в условиях зимней рыбалки. Тем не менее, их функционал рассчитан и на рыбалку с лодки, а в некоторых моделях – на рыбалку с берега. Где купить эхолот для рыбалки практик видео обзор? Луч датчика Эхолота сканирует все расстояние от поверхности датчика до дна и преобразует полученные ультразвуковые импульсы в четкое монохромное изображение на дисплее. Если рыболов не увидел на экране ничего интересного для себя, можно смело покидать это место и не проводить массу времени в ожидании клева.
Видео. Видеоинструкции. Результат многолетней работы инженеров . Зимняя рыбалка с эхолотом ПРАКТИК 7 RF. Ловля Окуня и Плотвы Зимой (Эхолот . Рыбалка с эхолотом Практик 7 Фидер: первый опыт. Эхолот Практик ЭР-6Pro2 отличия от модели Практик ЭР-6Pro. Обзор основных моделей эхолотов Практик. Если говорить о преимуществах эхолотов российского . Немного о типах рыбалки. Обратите внимание, что проводные модели 6S, 6M и 6PLUS не подходят для рыбалки с берега. Видео с рыбалки эхолотом практик, отзыв , обзор , купить , смотреть видео. . Отзывы эхолот Практик 6 7 8. Диалоги о рыбалке.
Если говорить о преимуществах эхолотов российского . Немного о типах рыбалки. Обратите внимание, что проводные модели 6S, 6M и 6PLUS не подходят для рыбалки с берега. Видео с рыбалки эхолотом практик, отзыв , обзор , купить , смотреть видео. . Отзывы эхолот Практик 6 7 8. Диалоги о рыбалке.
http://ethio3f.com/ehpea/userfiles/kupit_ekholot_praktik_6m_v_rassrochku1961.xml
http://www.stanir.ru/userfiles/nastroika_ekholota_praktik_6m_zimnii_rezhim2212.xml
http://sruby.srubystal.pl/user_upload/ekholot_praktik_kupit_v_kirove1392.xml
https://halabudisov.cz/UserFiles/File/kupit_ekholot_praktik_6_m_v_moskve7143.xml
https://www.naturel21.com/upload/ekholot_praktik_6m_v_rassrochku4209.xml
Эхолот “Практик” -это качественный эхолот для рыбака и я им доволен. Несмотря на то, что у меня есть второй эхолот с беспроводным датчиком другого производителя, я все-равно продолжаю использовать “Практик” на зимней рыбалке на льду. Эхолот подойдет тем, кто занимается рыбалкой профессионально или зарабатывает на этом. НО при покупке учтите, что эхолот не предназначен для рыбалки с берега.
НО при покупке учтите, что эхолот не предназначен для рыбалки с берега.
эхолот для рыбалки практик видео обзор
Я заядлый рыбак, не давно прикупил себе для пробы российский эхолот Практик. В работе я им очень доволен: линию дна показывает точно, большие предметы, такие как коряги, не воспринимает как дно, кабель прочный, морозостойкий (немного дубоватый). Работает быстро, даже в сильные морозы. Неплохая контрастность дисплея. Если села батарейка, все настройки сохраняются, да и сами настройки не сложные. Чувствительность средняя, очень удобно, что зимой показывает через лед.
Аккумуляторы для солнечных батарей. Аккумуляторы для эхолотов. Аккумуляторы для генераторов. Аккумуляторы пожарные. Аккумуляторы для эхолотов, для лодочных насосов 12 В ёмкостью 4, 5, 7, 12 ач, Alarm Force, General Security, аккумулятор 12 в 18 ампер часов для снегохода, зарядные устройства купить в интернет-магазине Аллигатор с гарантией и. Эхолот можно подключить к лодочному аккумулятору. . Необслуживаемые и не проливаемые АКБ с удобной ручкой для переноски, позволят обеспечить электропитанием лодочный мотор, эхолот и насос для подкачи воздуха в лодку. Разновидности аккумуляторов для эхолотов. При выборе прибора для подзарядки эхолота можно воспользоваться . Самым лучшим источником питания для эхолота в лодке будет батарея с технологией AGM, именно ее следует выбрать. Такие АКБ отвечают всем вышеперечисленным критериям. Вес не.
. Необслуживаемые и не проливаемые АКБ с удобной ручкой для переноски, позволят обеспечить электропитанием лодочный мотор, эхолот и насос для подкачи воздуха в лодку. Разновидности аккумуляторов для эхолотов. При выборе прибора для подзарядки эхолота можно воспользоваться . Самым лучшим источником питания для эхолота в лодке будет батарея с технологией AGM, именно ее следует выбрать. Такие АКБ отвечают всем вышеперечисленным критериям. Вес не.
| Категория | Стандарт Особенность |
Нова Технические характеристики Ray® ROV Model 5000 |
| Производительность | ||
| Глубина | Глубина Рейтинг |
305 метров (1000 футов).  |
| Токи | Стабильность в сильных течениях |
Дугообразный конструкция крыла противостоит дестабилизирующему эффекту сопротивления троса. Обеспечивает более быструю и стабильную работу на токах с кабель меньше. |
| Маневренность | Двойной Режим работы |
Банка буксировать или использовать подруливающие устройства при сильном течении.См. Скорость для узлов. |
| Скорость | Вверх до 9 узлов на течениях на буксире.  С подруливающими устройствами: от 4 до 6 узлов С подруливающими устройствами: от 4 до 6 узлов(1/4 или 1/3 л.с. соответственно) |
|
| Кабель к коэффициенту глубины |
Под буксировка, Nova Ray® обеспечивает более глубокую работу с меньшим количеством кабеля чем другие подводные буксируемые аппараты (UTV).Нова Рэй® может работать до 70% глубже, чем обычные системы UTV используя одинаковую длину кабеля. При буксировке работает на соотношении 2,38:1. С подруливающими устройствами Nova Ray® может уменьшить соотношение 2:1. Благодаря меньшему количеству кабелей система Nova Ray® легче, меньше и легко развертывается в любой точке мира на основе быстрого реагирования. |
|
| Подруливающие устройства | ДЦ бесщеточные редкоземельные двигатели.  Два (1 по левому борту; 1 по правому борту) магнитные Два (1 по левому борту; 1 по правому борту) магнитныеводить машину; Стандартная мощность 1/4 л.с. при 150 вольт постоянного тока. Дополнительно 1/3 л.с. Гребные винты и защита подруливающего устройства (пластик HMW): 75 мм для 1/4 л.с., и 90 мм для 1/3 л.с. |
|
| Управление Поверхности |
Руль направления обеспечивает направленное управление; два элевона обеспечивают вертикальное позиционирование (контроль глубины). |
|
| Пупочный | Длина, Диаметр, Тип |
Длина: 300 футов (91,4 м). Диаметр: 15 мм. Тип: 12-жильный, нейтральный жизнерадостный.  |
| Пользовательский Пупочный |
Длина соответствовать спецификациям пользователя; доступно опциональное оптоволокно. |
|
| Температура Рейтинг |
Операционная Диапазон |
-2 до 42 градусов С. |
| Команда и система управления |
||
| Интегрированный Консоль управления |
3 оси джойстик; кнопки выбора режима и ползунковый дроссель; авто возможность пилотирования; ЖК монитор; ноутбук с проприетарной Windows™ программное обеспечение на базе ; ЖК-видео дисплей.  Ввод/вывод: видеовыход, монитор Ввод/вывод: видеовыход, мониторв; RS-232 и RS-485, гидрофон готов. |
|
| Цифровой Бортовая электроника |
Полностью Цифровой: точное управление и простая интеграция цифровых периферийных устройств. устройства. Собственное встроенное программное обеспечение. |
|
| Собственность Программное обеспечение |
||
| Рейс Контроль |
Выбор ручного или 3 режима автопилота: Удержание курса, Уровень крыльев и удержание глубины (дополнительный высотомер обеспечивает дополнительную режим: Удержание высоты).  |
|
| Приборы | ||
| Глубина Датчик |
Глубина манометр с диапазоном от 0 до 340 метров. |
|
| Компас | Твердый состояние с коррекцией по тангажу и крену и встроенным термометром. |
|
| Визуализация | ||
| Сторона Сканирующий сонар |
Сонар бокового обзора Imagenex | |
| Вперед Сканирующий сонар |
Сонар BlueView Technologies | |
| Видео, Камера, освещение |
||
| Видео Дисплей |
Квартира Панельный монитор |
254мм цветной жидкокристаллический видеомонитор.  Композитный NTSC или PAL. Вне Композитный NTSC или PAL. ВнеПорт: RCA и S Video. |
| Внутренний Камера |
Тип и Резолюция |
Цвет. 480 ТВЛ (макс. высокое разрешение для цвета), ПЗС 1/3 дюйма, NTSC или ПАЛ. |
| Чувствительность и объектив |
1 люкс @ F1.2 для цветной камеры. Объектив: 4 мм, F1.2 или широкоугольный: 2,6 мм, Ф1.6. |
|
| Фокус и наклон |
Регулируемый с автоматическим балансом белого и автоматической диафрагмой.  Диапазон ручного наклона: Диапазон ручного наклона:90 градусов. |
|
| Внешний Камера |
Тип и Резолюция |
Цвет.480 ТВЛ с CS (макс. высокое разрешение для цвета), ПЗС-матрица 1/3 дюйма, NTSC или PAL. |
| Чувствительность, Объектив, Мощность, Ток |
1 люкс. Стандартный 2,9 мм F1,4 или 3,7 мм F1,4. Питание: только 12 В постоянного тока; Текущий: 160 мА макс. |
|
| Фокус и сканирование |
Стандарт 100 мм до бесконечности.  Сканирование: 525 строк 60 Гц NTSC или 625 строк Сканирование: 525 строк 60 Гц NTSC или 625 строк50 Гц PAL. |
|
| Сигнал отношение к шуму, угол обзора, композитный видеовыход |
Сигнал отношение к шуму: >48 дБ (АРУ выключена). Угол обзора: 92 по диагонали в воздухе; 65 в воде для объектива 2,9 мм. 78 по диагонали в воздухе; 56 в воде для объектива 3,7 мм.Видеовыход: 1,0 В пик-пик. |
|
| Фонари | Передний Фары |
Двойной Мини-кварц мощностью 150 Вт. Диаграмма луча 78 градусов (включенный угол до половины мощности). |
| РОВ Характеристики |
||
| Физический | Длина, Ширина, высота, вес |
л: 1114 мм.  Ш: 997 мм. В: корпус: 268 мм; Руль направления: 393 мм. Масса: Ш: 997 мм. В: корпус: 268 мм; Руль направления: 393 мм. Масса:37кг. |
| Электрика | Соединители | Стандарт водонепроницаемые переборочные соединители и два дополнительных соединителя. |
| Линия и напряжение на пуповине, мощность |
Строка: 120 В переменного тока 60 Гц.Пуповина: 109 В переменного тока. Потребляемая мощность: 900 -1100 Вт. |
|
| Корпус | Строительство | Одноместный корпус из анодированного алюминия 6061 T6 с запатентованным каналом и рельсовая система для крыльев, подруливающих устройств, салазок и дополнительных устройств (без сварных швов и проникновения в корпус, включая тройную букву «О» кольца для обеспечения герметичности системы корпуса.  Включает Включаетудлинение носа и полозья Nova+. |
| РОВ Строительство |
Материал | Ключ Формованные компоненты ROV: ударопрочный, легкий полиуретан смола. Дополнительные фитинги и крепления изготовлены из нержавеющей стали или алюминий для коррозионной стойкости и долговечности. |
| Посмотреть и легкие порты |
Посмотреть купол: отожженный, ударопрочный акрил 3/8″.Огни: Кварцевое окно 1/4 дюйма и глубина до 1000 метров. |
|
| Прочее | Транспорт Кейсы |
Водонепроницаемый чехол пульта управления.  ручная кладь коммерческой авиакомпании. ручная кладь коммерческой авиакомпании.3-кейса для ТНПА и шлангокабеля перевозятся в качестве коммерческого багажа. Все они включают телескопические ручки и колеса. |
| Доставка Вес |
Управление Консоль: 20 кг. Транзитные чемоданы: 86 кг. Всего. |
|
| Инструменты и запасные части |
Инструмент Комплект |
ОТВОДОВ Комплект (стандартный набор инструментов и деталей) обеспечивает базовую сборку в полевых условиях. и обслуживание. |
| Гарантия | Соглашение | Детали можно получить в службе поддержки клиентов.  |
SONAR – VideoRay
Многолучевой гидролокатор Tritech Gemini 1200ik работает на двух акустических частотах: 720 кГц для обнаружения целей на больших расстояниях и 1200 кГц для улучшенного изображения с высоким разрешением на более коротких дистанциях.Переключение между акустическими частотами осуществляется либо вручную, либо автоматически в диапазоне, заданном пользователем.
Уникальной особенностью 1200ik является способность поддерживать поле обзора 120° при работе на обеих частотах. Это позволяет интересующей цели всегда оставаться в поле зрения, даже если цель находится в ближней зоне.
Обработка CHIRP гарантирует, что Gemini 1200ik может обеспечивать изображение с высоким разрешением на больших расстояниях, а встроенный датчик VOS обеспечивает отображение изображения с высокой степенью точности.
Работая на глубине до 35 м, Gemini 1200ik может использоваться на различных транспортных средствах малого и среднего размера, а также устанавливаться на более крупные транспортные средства, работающие на мелководье.
вода.
Gemini 1200ik полностью совместим с программным пакетом Tritech Genesis, который улучшает взаимодействие с пользователем и позволяет управлять несколькими датчиками Tritech из одного программного пакета.
Имея такой же физический размер и идентичный интерфейс подключения, Gemini 1200ik можно заменить на любой уже установленный 720ik, что обеспечивает простой путь модернизации для получения изображения с более высоким разрешением.
Как и все продукты Gemini, программное обеспечение SeaTec можно использовать для принятия более сложных решений на основе данных гидролокатора. Более высокое разрешение Gemini 1200ik позволяет выполнять классификацию целей с еще более высокой степенью точности.
Наконец, комплект разработки программного обеспечения Gemini (SDK) также поддерживает Gemini 1200ik и доступен для операционных систем Windows и Linux.
Характеристики
Совместим с Pro 5 и Defender
Управление океанических исследований NOAA
Многолучевой гидролокатор
— тип активной гидролокационной системы, используемой для картографирования морского дна и обнаружения объектов в толще воды или вдоль морского дна. Несколько физических датчиков гидролокатора, называемых массивом преобразователей, отправляют и принимают звуковые импульсы, которые отображают морское дно или обнаруживают другие объекты. Многолучевая решетка обычно монтируется непосредственно на корпус корабля.
Несколько физических датчиков гидролокатора, называемых массивом преобразователей, отправляют и принимают звуковые импульсы, которые отображают морское дно или обнаруживают другие объекты. Многолучевая решетка обычно монтируется непосредственно на корпус корабля.
Многолучевая батиметрия, собранная во время этапа 1 экспедиции Windows to the Deep 2019 у берегов юго-востока Соединенных Штатов, выявила несколько интересных особенностей, которые были исследованы с помощью дистанционно управляемых транспортных средств во время этапа 2 экспедиции. Изображение предоставлено Управлением океанических исследований NOAA, Windows to the Deep 2019. Загрузите увеличенную версию (jpg, 2,8 МБ).
Как это работает?
В отличие от однолучевого гидролокатора, который использует только один преобразователь для картирования морского дна, многолучевой гидролокатор одновременно посылает несколько одновременных гидролокационных лучей (или звуковых волн) в форме веера. Это охватывает пространство как непосредственно под кораблем, так и по бокам.Multibeam собирает два типа данных: глубину морского дна и обратное рассеяние. Глубина морского дна, или батиметрия, вычисляется путем измерения времени, которое требуется звуку, чтобы покинуть массив, достичь морского дна и вернуться в массив. Ученые на борту корабля измеряют скорость звука в воде, где они проводят съемку, чтобы они могли перевести время в обе стороны от корабля до морского дна и обратно в качестве измерения глубины. Обратное рассеяние — это измерение интенсивности звукового эха, которое отражается обратно в многолучевую решетку.
Это охватывает пространство как непосредственно под кораблем, так и по бокам.Multibeam собирает два типа данных: глубину морского дна и обратное рассеяние. Глубина морского дна, или батиметрия, вычисляется путем измерения времени, которое требуется звуку, чтобы покинуть массив, достичь морского дна и вернуться в массив. Ученые на борту корабля измеряют скорость звука в воде, где они проводят съемку, чтобы они могли перевести время в обе стороны от корабля до морского дна и обратно в качестве измерения глубины. Обратное рассеяние — это измерение интенсивности звукового эха, которое отражается обратно в многолучевую решетку.
Видео предоставлено NOAA.
Результаты обратного рассеяния могут предоставить ученым информацию о геологическом составе морского дна или объектов на нем. Например, твердые каменистые материалы обычно отражают больше звука, чем более мягкие материалы, такие как грязь.
Например, твердые каменистые материалы обычно отражают больше звука, чем более мягкие материалы, такие как грязь.
Многолучевые сонары
также могут собирать измерения обратного рассеяния для объектов, отражающих звук в толще воды.Данные обратного рассеяния в толще воды можно использовать для выявления объектов в толще воды, таких как трехмерные структуры, связанные с кораблекрушениями, пузырьковые шлейфы, исходящие от морского дна, и плотные слои биологии.
Что будет дальше?
Компьютеры на корабле собирают эти данные, а гидрографы обрабатывают их для создания цветных двух- или трехмерных батиметрических карт (глубины воды), которые помогают визуализировать морское дно. В приведенном ниже примере батиметрической карты более теплые цвета (красный и оранжевый) соответствуют более мелким участкам, а более холодные цвета (желтый и зеленый) — более глубоким.
Шлейф пузырьков (светло-зеленый и желтый) поднимается со дна моря на подводной горе Вайлулуу на одном снимке данных многолучевого гидролокатора, собранных во время экспедиции на Американское Самоа в 2017 году. Изображение предоставлено Управлением океанических исследований и исследований NOAA, 2017 г., Американское Самоа. Скачать увеличенную версию (jpg, 359 КБ).
Изображение предоставлено Управлением океанических исследований и исследований NOAA, 2017 г., Американское Самоа. Скачать увеличенную версию (jpg, 359 КБ).
Почему это важно?
Многолучевой гидролокатор
полезен как для определения характеристик водной толщи, так и морского дна.Например, в водной толще данные многолучевого обратного рассеяния могут улавливаться шлейфами пузырьков. Это может указывать на наличие холодного просачивания, то есть места выхода газа со дна моря. Пузырьковые шлейфы также могут быть связаны с гидротермальными источниками, поддерживающими уникальные биологические сообщества.
При картировании морского дна многолучевая съемка позволяет охватить всю территорию и, следовательно, является эффективным способом систематического картографирования больших регионов. Однако чем больше глубина воды, тем ниже будет разрешение этой карты морского дна. Для картографирования морского дна с очень высоким разрешением необходимо иметь картографические гидролокаторы близко к морскому дну, что может означать их буксировку с кораблей или установку на дистанционно управляемых транспортных средствах (ROV) или автономных подводных аппаратах (AUV). Таким образом, многолучевое картографирование иногда используется в тандеме с гидролокационными системами бокового обзора, буксируемыми близко к морскому дну, которые обеспечивают изображения особенностей морского дна с более высоким разрешением.
Для картографирования морского дна с очень высоким разрешением необходимо иметь картографические гидролокаторы близко к морскому дну, что может означать их буксировку с кораблей или установку на дистанционно управляемых транспортных средствах (ROV) или автономных подводных аппаратах (AUV). Таким образом, многолучевое картографирование иногда используется в тандеме с гидролокационными системами бокового обзора, буксируемыми близко к морскому дну, которые обеспечивают изображения особенностей морского дна с более высоким разрешением.
Многолучевая гидроакустическая съемка часто является одним из первых шагов в изучении новой области.После определения глубины, формы и характера морского дна ученые могут планировать более комплексные погружения для ROV. Характер отложений, определенный с помощью многолучевого луча и подтвержденный видеоизображениями с дистанционным управлением, также дает представление о том, какие организмы могут обитать в этом районе, и помогает в процессе картирования пригодности среды обитания. Первоначальное многолучевое картирование закладывает основу для ответов на более конкретные вопросы исследования и изучения нашего океана.
Первоначальное многолучевое картирование закладывает основу для ответов на более конкретные вопросы исследования и изучения нашего океана.
Текст этой статьи адаптирован из книг «Как работает многолучевой гидролокатор» и «Как обратное рассеяние помогает нам понять морское дно?» От Национальной океанской службы.
SONAR , сокращение от Sound NAvigation and Ranging , представляет собой инструмент, который использует звуковые волны для исследования океана. Ученые в основном используют гидролокатор для разработки навигационных карт, обнаружения подводных опасностей для навигации, поиска и идентификации объектов в толще воды или на морском дне, таких как археологические памятники, а также для картирования самого морского дна. При гидроакустической съемке платформа оснащается группой физических датчиков, называемых массивом преобразователей.Этот массив излучает акустический сигнал или звуковой импульс в воду. Если объект находится на пути звукового импульса, он отражается от объекта и возвращает «эхо» в массив. Затем массив может измерить силу сигнала. Определяя время между испусканием звукового импульса и его приемом, можно определить дальность и ориентацию объекта.
Если объект находится на пути звукового импульса, он отражается от объекта и возвращает «эхо» в массив. Затем массив может измерить силу сигнала. Определяя время между испусканием звукового импульса и его приемом, можно определить дальность и ориентацию объекта.
%PDF-1.2
%
141 0 объект
>
эндообъект
внешняя ссылка
141 71
0000000016 00000 н
0000001789 00000 н
0000001910 00000 н
0000002052 00000 н
0000002868 00000 н
0000003081 00000 н
0000003165 00000 н
0000003259 00000 н
0000003348 00000 н
0000003457 00000 н
0000003518 00000 н
0000003579 00000 н
0000003697 00000 н
0000003758 00000 н
0000003908 00000 н
0000003969 00000 н
0000004122 00000 н
0000004208 00000 н
0000004295 00000 н
0000004356 00000 н
0000004457 00000 н
0000004558 00000 н
0000004619 00000 н
0000004720 00000 н
0000004781 00000 н
0000004842 00000 н
0000004903 00000 н
0000004964 00000 н
0000005124 00000 н
0000005210 00000 н
0000005296 00000 н
0000005397 00000 н
0000005458 00000 н
0000005559 00000 н
0000005620 00000 н
0000005681 00000 н
0000005742 00000 н
0000005803 00000 н
0000005891 00000 н
0000005977 00000 н
0000006078 00000 н
0000006139 00000 н
0000006200 00000 н
0000006261 00000 н
0000006323 00000 н
0000006489 00000 н
0000006599 00000 н
0000007931 00000 н
0000008040 00000 н
0000008062 00000 н
0000008170 00000 н
0000009012 00000 н
0000009034 00000 н
0000009145 00000 н
0000009960 00000 н
0000009982 00000 н
0000010684 00000 н
0000010706 00000 н
0000011499 00000 н
0000011521 00000 н
0000012432 00000 н
0000012746 00000 н
0000012893 00000 н
0000013876 00000 н
0000014589 00000 н
0000014612 00000 н
0000016086 00000 н
0000016106 00000 н
0000016190 00000 н
0000002117 00000 н
0000002846 00000 н
трейлер
]
>>
startxref
0
%%EOF
142 0 объект
>
эндообъект
143 0 объект
fz*e5x6nyG+)
/ U (y άsGMX + zX ^ 9`)
/P 65524
>>
эндообъект
144 0 объект
>
эндообъект
210 0 объект
>
ручей
r0SGHupr N#,aWbEEp(z%]{1mj’T[/B!(,3RZKȪddѓ[p6{$6spE@; mX+J̩YaV\L ,cyqQM5jv{Xyby?sgCtWp[)$P4{҈uZOHu”oNĘYR,XojP . 9+bզg~Qʛ3;#@6sԼf$[!B|/-
9+bզg~Qʛ3;#@6sԼf$[!B|/-
6-ϖ/м+=|о
@5
|3 A
Сонар и морское видео | Sector Scan, Marine Sonar Technology
Technology > Sensor Technology
Используя свои дистанционно управляемые транспортные средства в качестве платформы доставки, Hibbard Inshore может использовать широкий спектр новейших сенсорных технологий для доставки видео и данных которые нужны нашим клиентам.
- Видео
- Цвет
- Монохромный при слабом освещении
- Высокое разрешение
Большинство ROV компании Hibbard Inshore стандартно поставляются с цветными и монохромными видеокамерами для слабого освещения , а также могут быть дополнительно оснащены видеокамерами высокой четкости.Монохромные камеры для слабого освещения дают ROV возможность видеть детали, которые трудно обнаружить человеческому глазу, в то время как цветное видео важно при проверках для выявления коррозии и других форм обесцвечивания. Видео высокой четкости включает в себя такие форматы, как 1080i, и эти камеры могут быть добавлены дополнительно для подводной кинематографии и исследований.
Видео высокой четкости включает в себя такие форматы, как 1080i, и эти камеры могут быть добавлены дополнительно для подводной кинематографии и исследований.
- Сонар
- Сканирование секторов
- Профилирование
- Электронное сканирование
- Поддонный сонар
Для подводных операций большинство аппаратов Hibbard Inshore в стандартной комплектации оснащены гидролокатором секторного сканирования и профилирования .Гидролокатор секторного сканирования используется для осмотра перед транспортным средством, чтобы помочь в навигации в мутной воде и для обнаружения особенностей. Сонар для профилирования — это гидролокатор для определения размеров, который может измерять вертикальные поперечные сечения трубы или определять размер таких элементов, как размыв. Сонар с электронным сканированием включает в себя многолучевые и опознавательные гидролокационные системы. Эти системы отображают изображения аналогично гидролокаторам секторного сканирования, но имеют более быстрое время обновления для увеличения охвата. Поддонный гидролокатор можно использовать как для батиметрических съемок дна, так и для отображения слоистости и толщины различных слоев отложений вплоть до твердого дна.
Сонар с электронным сканированием включает в себя многолучевые и опознавательные гидролокационные системы. Эти системы отображают изображения аналогично гидролокаторам секторного сканирования, но имеют более быстрое время обновления для увеличения охвата. Поддонный гидролокатор можно использовать как для батиметрических съемок дна, так и для отображения слоистости и толщины различных слоев отложений вплоть до твердого дна.
- Система 3-D TunnelMap™
- Лазерный скалер
- Лазерное сканирование
- Подземный радар (GPR)
- Ультразвуковой толщиномер (UT)
- Электромагнитно-акустические преобразователи (ЭМАП)
- Инерциальные системы позиционирования
- GPS-системы
- Ультракороткая базовая линия (USBL)
Система классификации дна RoxAnn, гидролокатор бокового обзора и видеосалазки: пространственное разрешение и их использование при оценке воздействия траления | Журнал морских наук ICES
Аннотация
Для определения местоположения исследовательского участка и оценки физических эффектов экспериментального траления выдр в Баренцевом море использовались три дополнительных инструмента для характеристики морского дна с различным пространственным разрешением: акустическая система классификации морского дна (RoxAnn), гидролокатор бокового обзора и видеосани. Морская охраняемая территория (МОР) вокруг острова Медвежий была выбрана, так как она предлагала непромысловые эталонные участки. Район был сложным в топографическом отношении, что привело к определенным проблемам при выборе экспериментального участка из-за требований репрезентативности и однородности, а также подходящего субстрата для отбора проб. Систематические путевые маршруты с помощью RoxAnn давали широкомасштабные картины состояния дна, более информативное боковое сканирование позволяло выявить топографические рельефы, в то время как видеосани предоставляли подробную информацию о составе отложений и мелкомасштабных особенностях морского дна.Точное позиционирование буксируемых средств (трала, бокового обзора и видеосаней) обеспечивало получение объективных данных. Траловые доски и снасти для скалолазания образовали борозды, которые были видны гидролокатору бокового обзора и видео. Интенсивное траление также вызвало изменения акустических свойств за счет увеличения шероховатости и уменьшения жесткости.
Морская охраняемая территория (МОР) вокруг острова Медвежий была выбрана, так как она предлагала непромысловые эталонные участки. Район был сложным в топографическом отношении, что привело к определенным проблемам при выборе экспериментального участка из-за требований репрезентативности и однородности, а также подходящего субстрата для отбора проб. Систематические путевые маршруты с помощью RoxAnn давали широкомасштабные картины состояния дна, более информативное боковое сканирование позволяло выявить топографические рельефы, в то время как видеосани предоставляли подробную информацию о составе отложений и мелкомасштабных особенностях морского дна.Точное позиционирование буксируемых средств (трала, бокового обзора и видеосаней) обеспечивало получение объективных данных. Траловые доски и снасти для скалолазания образовали борозды, которые были видны гидролокатору бокового обзора и видео. Интенсивное траление также вызвало изменения акустических свойств за счет увеличения шероховатости и уменьшения жесткости. Результаты согласуются с возможным повторным взвешиванием осадка и гомогенизирующим эффектом траловых досок и наземных снастей, вспахивающих местность. Обсуждаются пригодность и преимущества использования пространственно перекрывающихся инструментов в исследованиях воздействия трала.
Результаты согласуются с возможным повторным взвешиванием осадка и гомогенизирующим эффектом траловых досок и наземных снастей, вспахивающих местность. Обсуждаются пригодность и преимущества использования пространственно перекрывающихся инструментов в исследованиях воздействия трала.
Введение
Воздействие рыболовства на окружающую среду вызывает растущий интерес в течение последних нескольких десятилетий (Hall, 1999). Наиболее очевидным следствием рыбного промысла было сокращение запасов многих крупных рыб (Myers et al. ., 1996) и вылов рыбы в морской пищевой сети (Pauly et al. ., 1998), но вторичные последствия для не- целевые виды и местообитания также вызывают растущую обеспокоенность (Kaiser and De Groot, 1999). Считается, что изменение среды обитания имеет серьезные последствия для многих видов беспозвоночных и рыб (см.г. Дженнингс и Кайзер, 1998 г.; Лэнгтон и Остер, 1999).
Для того чтобы удовлетворить требования рыболовной промышленности и ее необходимость освоения новых и более глубоких участков с более грубым дном для удовлетворения растущей конкуренции за ограниченные рыбные ресурсы, постепенно развивались более тяжелые снасти (Van Beek et al. ., 1990). ; Jones, 1992), что, в свою очередь, оставляет нетронутыми меньше территорий и типов местообитаний (Mortensen et al ., 2000). Баренцево море занимает площадь около 1,2 млн км 2 , где состояние дна широко варьируется от песка и ила до крупнозернистого грунта, состоящего из булыжника и камней (рис. 1), и где ведется важный донный траловый промысел.На сегодняшний день большинство исследований воздействия проводилось на относительно плоских песчаных и илистых отложениях (Колли и др. ., 2000), хотя в некоторых сообщениях сообщалось о воздействии на более грубые типы дна, такие как галька, булыжник и валуны (Колли и др. ). ., 1997; Freese и др. , 1999). Таким образом, общепризнанные методы, инструменты и оборудование для изучения воздействия промысла на относительно плоское однородное дно на окружающую среду могут оказаться неприменимыми к этим более топографически сложным местам обитания, и поэтому необходима оценка таких методов для обеспечения беспристрастного сбора данных.
., 1990). ; Jones, 1992), что, в свою очередь, оставляет нетронутыми меньше территорий и типов местообитаний (Mortensen et al ., 2000). Баренцево море занимает площадь около 1,2 млн км 2 , где состояние дна широко варьируется от песка и ила до крупнозернистого грунта, состоящего из булыжника и камней (рис. 1), и где ведется важный донный траловый промысел.На сегодняшний день большинство исследований воздействия проводилось на относительно плоских песчаных и илистых отложениях (Колли и др. ., 2000), хотя в некоторых сообщениях сообщалось о воздействии на более грубые типы дна, такие как галька, булыжник и валуны (Колли и др. ). ., 1997; Freese и др. , 1999). Таким образом, общепризнанные методы, инструменты и оборудование для изучения воздействия промысла на относительно плоское однородное дно на окружающую среду могут оказаться неприменимыми к этим более топографически сложным местам обитания, и поэтому необходима оценка таких методов для обеспечения беспристрастного сбора данных.
Рисунок 1
Исследовательский участок внутри 20-мильной МОР вокруг острова Медвежий и типы дна в прилегающих районах (воспроизведено с разрешения Elverhøi and Solheim, 1983).
Рисунок 1
Исследовательский участок внутри 20-мильной МОР вокруг острова Медвежий и типы дна в прилегающих районах (воспроизведено с разрешения Elverhøi and Solheim, 1983).
В мае 2000 г. в Баренцевом море начался 18-месячный проект по изучению воздействия и восстановления донных тралов.Чтобы выполнить количественный план BACI (до/после, контроль/воздействие) для биологического отбора проб, экспериментальный район должен был соответствовать требованию отсутствия влияния какой-либо недавней предыдущей промысловой деятельности. Кроме того, район должен быть репрезентативным для коммерческих траловых угодий с точки зрения видового состава, донной среды обитания, топографии, распределения по глубине, а также подходить для биологического отбора проб. Морской охраняемый район (МОР) вокруг острова Медвежий в Баренцевом море (создан в 1977 г. ) был выбран в качестве единственного участка, который мог обеспечить действительно ненарушенные участки для контроля.Здесь мы описываем и обсуждаем разрешение и пространственную изменчивость данных бокового сканирования, видео-салазок и данных RoxAnn, а также то, как использовать объединенную информацию для определения местоположения экспериментального участка, объективного отбора проб и оценки физического воздействия. Насколько нам известно, это первое исследование, посвященное изучению воздействия промысла на морское дно Баренцева моря на окружающую среду.
) был выбран в качестве единственного участка, который мог обеспечить действительно ненарушенные участки для контроля.Здесь мы описываем и обсуждаем разрешение и пространственную изменчивость данных бокового сканирования, видео-салазок и данных RoxAnn, а также то, как использовать объединенную информацию для определения местоположения экспериментального участка, объективного отбора проб и оценки физического воздействия. Насколько нам известно, это первое исследование, посвященное изучению воздействия промысла на морское дно Баренцева моря на окружающую среду.
Материалы и методы
Экспериментальный участок
Эксперимент проводился с 10 по 24 мая 2000 г. в точке с координатами 74°30′ с.ш. 18°12′ в.д., в 9 морских милях к западу от острова Медвежий в Баренцевом море (рис. 1).Точное местоположение экспериментальной области было основано на акустическом картировании системы классификации дна RoxAnn, записях гидролокатора бокового обзора и видеонаблюдениях с санями (см. описание ниже).
описание ниже).
Мы выбрали один район (T и ) для интенсивного промысла с 10 непрерывными перекрывающимися траловыми следами в коридоре шириной 200 м и длиной 2,2 км и один район умеренного промысла (T м ) с 10 непрерывными перекрывающимися траловыми следами в пределах коридор шириной 600 м и длиной 2,2 км (рис. 2).Все траления велись в направлении восток-запад, равномерно распределяя усилие параллельными путями внутри коридоров. Между траловыми коридорами также располагались три эталонных участка шириной 100 м (C 1–3 ) без промысловой деятельности. Расстояние между коридорами 200 м. Траление осуществлялось коммерческим траулером, оснащенным стандартным донным тралом (Cotesi maxi 404/A) с снастями Rockhopper (диаметр 21″, длина 19 м), бобинами (диаметр 11″, по 37,5 м с каждой стороны в сторону тралов), траверсы (140 м), выдровые доски (по 2300 кг каждая) и ширина ворот примерно 140 м, измеренная датчиками Scanmar .
Рисунок 2
Относительное положение различных коридоров в районе исследований: T и = интенсивно тралится, T м = тралится умеренно и C 1–3 = контроль. Сетки обозначают салазки-пробоотборники. Очерченные области показывают приблизительное расположение буксиров бокового обзора, показанных на рисунках 4 и 7.
Сетки обозначают салазки-пробоотборники. Очерченные области показывают приблизительное расположение буксиров бокового обзора, показанных на рисунках 4 и 7.
Рисунок 2
Относительное положение различных коридоров в районе исследования: T i = тралится интенсивно, T м = тралится умеренно и C 1–3 = контроль.Сетки обозначают салазки-пробоотборники. Обведенные области показывают приблизительное расположение буксиров бокового обзора, показанных на рисунках 4 и 7.
Приборы
Ультразвуковой процессор RoxAnn предлагает классификацию особенностей морского дна в режиме реального времени посредством обработки сигналов судового эхолота. Компания RoxAnn была подключена к научному эхолоту Simrad EK 500, подключенному к датчику с расщепленным лучом 38 кГц, расположенному на шверте судна, и собирала данные с интервалом в 5 секунд.RoxAnn различает типы материала морского дна, и выходные данные в цифровом формате, готовые для компьютерного анализа, E1 (шероховатость ) и E2 (твердость ), получаются путем интегрирования различных частей первого и второго эхосигналов (Caddel, 1998). ). Система была откалибрована во время пробной съемки во фьорде недалеко от Бергена на юго-западе Норвегии, где состояние дна было известно в деталях, и цвет траектории движения корабля на картографическом плоттере соответствовал цвету подложки под ним (рис. 3).Впоследствии была проведена дополнительная наземная проверка путем получения образцов саней, видео и записей гидролокатора бокового обзора на месте исследования. На глубине около 95 м луч имеет ширину около 12 м и площадь охвата около 106 м 2 (в точке 7° 3 дБ).
). Система была откалибрована во время пробной съемки во фьорде недалеко от Бергена на юго-западе Норвегии, где состояние дна было известно в деталях, и цвет траектории движения корабля на картографическом плоттере соответствовал цвету подложки под ним (рис. 3).Впоследствии была проведена дополнительная наземная проверка путем получения образцов саней, видео и записей гидролокатора бокового обзора на месте исследования. На глубине около 95 м луч имеет ширину около 12 м и площадь охвата около 106 м 2 (в точке 7° 3 дБ).
Рис. 3
Линии треков RoxAnn, показывающие различные типы дна внутри МОР Медвежьего острова длиной 20 морских миль: темно-серый = плотно утрамбованный песок и ил; белый = песок и гравий/камни. Пунктирная линия указывает на выбранную область исследования.
Рис. 3
Линии треков RoxAnn, показывающие различные типы дна внутри МОР Медвежьего острова длиной 20 морских миль: темно-серый = плотно утрамбованный песок и ил; белый = песок и гравий/камни. Пунктирная линия указывает на выбранную область исследования.
Пунктирная линия указывает на выбранную область исследования.
Гидролокатор бокового обзора Simrad MS992 использовался для детального наблюдения за морским дном. Для акустических наблюдений использовался буксир, работающий на частоте 120 кГц, и данные записывались в виде распечаток и кассет DAT. Буксирное судно, на котором были установлены датчики глубины, пеленга, температуры, тангажа и качки, буксировалось примерно на 10–30 м над дном и собирало данные высокого разрешения о строении и топографии дна в секторе, охватывающем около 200 м морского дна на каждом боковая сторона.Датчик Simrad Integrated Trawl Instrumentation (ITI) был подключен к тросу для точного позиционирования.
Система ITI представляет собой беспроводную систему позиционирования и мониторинга трала. Система, которая использовалась для позиционирования трала, видеосаней и гидролокатора бокового обзора в заранее выбранных коридорах, основана на гидроакустической связи между преобразователем, установленным на судне, и датчиком, установленным на позиционируемом устройстве. Датчик определял положение различных устройств относительно судна путем измерения глубины, расстояния до судна и углового отклонения его положения относительно курса судна.Система управляется с помощью меню команд, отображаемых на цветном видеоэкране. Точность ITI составляет ±5 м при расчете длины прямой линии между судном и датчиком и погрешность пеленга ±1° (Техническая спецификация ITI).
Отбор проб
Грейфер ван Вина был испытан на предмет возможного использования в качестве основного инструмента для отбора проб, но вскоре выяснилось, что он не может гарантировать количественные пробы, поскольку собирает небольшие неравные количества субстрата, а также страдает от невозможности визуального наблюдения.Для вылова более подвижной фауны был испытан трал Agassiz (разновидность трала-биммера). Однако это снаряжение не имело надлежащей конструкции и было разбито и разрушено во время буксировки по пересеченной местности. В конце концов были выбраны сани (Sneli, 1998) для получения количественных проб бентосных сообществ. Сани для отбора проб предназначены для отбора проб эпифауны и части инфауны в верхних сантиметрах мягкого дна. Сани имеют размеры 200×80×20 см и весят около 80 кг. Для предотвращения опрокидывания саней к верхней части саней крепились 10 буев (12″), а к нижней части – четыре груза (по 10 кг каждый).Перед санями разместили камеру и свет, чтобы следить за средой обитания на морском дне и работой саней. Аккумуляторы и записывающее устройство размещались сверху салазок. Данные проб саней будут использоваться для анализа влияния тралового лова на эпифауну в одной из будущих публикаций, тогда как данные саней используются здесь для проверки на местности.
Сани для отбора проб предназначены для отбора проб эпифауны и части инфауны в верхних сантиметрах мягкого дна. Сани имеют размеры 200×80×20 см и весят около 80 кг. Для предотвращения опрокидывания саней к верхней части саней крепились 10 буев (12″), а к нижней части – четыре груза (по 10 кг каждый).Перед санями разместили камеру и свет, чтобы следить за средой обитания на морском дне и работой саней. Аккумуляторы и записывающее устройство размещались сверху салазок. Данные проб саней будут использоваться для анализа влияния тралового лова на эпифауну в одной из будущих публикаций, тогда как данные саней используются здесь для проверки на местности.
Результаты
Описание морского дна
Участок размером примерно 6,8×4,4 км на северо-западной стороне острова Медвежий был нанесен на карту с использованием системы RoxAnn с зигзагообразными следами на расстоянии 300–400 м друг от друга (охват примерно 8%). Линии трека с разными цветами указывают на различия в типах субстрата в этой области (рис. 3). Уплотненный песок/ил и песок/гравий/камни были единственными типами дна в этом районе, обнаруженными RoxAnn. Два типа дна были пространственно разделены, и для дальнейшей характеристики был выбран меньший исследовательский участок размером 1,9×2,3 км с более однородным донным субстратом. Дополнительные пути были проведены в направлении восток-запад, что дало T i расчетное покрытие 54% и T m 15%.В эталонных коридорах дополнительные дорожки не делались из-за нехватки времени. Средняя глубина области исследований составила 94 ± 7 м, и RoxAnn указал субстрат, состоящий из песка и ила в соответствии с заданной калибровкой. Эта область была разделена на пять коридоров, как описано выше (рис. 2).
Линии трека с разными цветами указывают на различия в типах субстрата в этой области (рис. 3). Уплотненный песок/ил и песок/гравий/камни были единственными типами дна в этом районе, обнаруженными RoxAnn. Два типа дна были пространственно разделены, и для дальнейшей характеристики был выбран меньший исследовательский участок размером 1,9×2,3 км с более однородным донным субстратом. Дополнительные пути были проведены в направлении восток-запад, что дало T i расчетное покрытие 54% и T m 15%.В эталонных коридорах дополнительные дорожки не делались из-за нехватки времени. Средняя глубина области исследований составила 94 ± 7 м, и RoxAnn указал субстрат, состоящий из песка и ила в соответствии с заданной калибровкой. Эта область была разделена на пять коридоров, как описано выше (рис. 2).
Наблюдения с 16 буксиров бокового обзора в направлении восток–запад, охватывающих весь полигон, показали, что район исследований не был столь однородным, как указывали данные RoxAnn, а состоял из 5–6 параллельных гребней (шириной 30–90 м) более грубого материала, ориентированного в юго-западном/северо-восточном направлении на Т и (рис. 4) и рассеянных более мелких участков на Т м и эталонных коридорах.Комбинируя отпечатки бокового сканирования, дно можно было увидеть как снимок всей исследовательской площадки.
4) и рассеянных более мелких участков на Т м и эталонных коридорах.Комбинируя отпечатки бокового сканирования, дно можно было увидеть как снимок всей исследовательской площадки.
Рисунок 4
Запись гидролокатора бокового обзора, показывающая параллельные гребни более грубого грунта с камнями, простирающимися поперек направления буксировки. Максимальная ширина левого и правого гребней: 50 и 90 м соответственно. Приблизительное положение записи показано на Рис. 2.
Рис. 4
Запись гидролокатора бокового обзора, показывающая параллельные гребни более грубого грунта с камнями, простирающимися поперек направления буксировки.Максимальная ширина левого и правого гребней: 50 и 90 м соответственно. Приблизительное положение записи показано на Рисунке 2.
Видео и пробы саней показали, что более неровные участки состоят из мелких камней и камней, иногда до 1 м в диаметре, в отличие от участков между ними, состоящих из смешанного ила/песка, гравия и фрагменты раковины Mya truncata и Balanus spp. , часто с пятнистым распределением вдоль направления выборки. На участках между хребтами наблюдалось несколько признаков сидячей трехмерной строительной фауны, однако на гребнях была замечена некоторая структурно формирующаяся фауна (прямостоячие гидроиды, инкрустирующие усоногие и мшанки), которые служили твердым субстратом для их прикрепления.Визуально распознаваемая на видео фауна состояла в основном из морских ежей, офиур и ряда подвижных свободно плавающих ракообразных, головоногих моллюсков, а также мелких пелагических и придонных рыб, убегающих перед санями.
, часто с пятнистым распределением вдоль направления выборки. На участках между хребтами наблюдалось несколько признаков сидячей трехмерной строительной фауны, однако на гребнях была замечена некоторая структурно формирующаяся фауна (прямостоячие гидроиды, инкрустирующие усоногие и мшанки), которые служили твердым субстратом для их прикрепления.Визуально распознаваемая на видео фауна состояла в основном из морских ежей, офиур и ряда подвижных свободно плавающих ракообразных, головоногих моллюсков, а также мелких пелагических и придонных рыб, убегающих перед санями.
Отбор проб и позиционирование
Видеозаписи позволили нам провести критическую оценку каждого санного траления в дополнение к визуальному подтверждению того, что пробы после траления взяты из затронутого района, поскольку следы траления были хорошо видны в нескольких местах.Участки грубого грунта (камни и камни), скорость движения саней (как слишком низкая, так и слишком высокая) и волновое воздействие (в периоды свежего бриза с результирующей высотой волны до 2,5 м) отрицательно сказывались на работе саней. В периоды более суровой погоды, чем свежий ветер, отбор проб невозможен. Из 102 выборок 65% были признаны успешными и подходящими для количественного анализа.
В периоды более суровой погоды, чем свежий ветер, отбор проб невозможен. Из 102 выборок 65% были признаны успешными и подходящими для количественного анализа.
Позиционирование трала в коридорах T i и T m было выполнено путем проверки данных о местоположении ITI в режиме реального времени и дало 100%-й уровень успеха.Это упражнение дало охват трала Т и 700 %, а Т м охват 230 %, рассчитанный по расстоянию между выдровыми досками (140 м). Покрытие, рассчитанное по ширине шестерни и бобин рокхоппера (примерно 40 м), дало 200% и 67% для Т и и Т м соответственно.
Средняя скорость санных тяг составляла примерно 0,5 м с −1 , а средняя длина тяги составляла 65 м. За пределами коридоров выборки не производились, а также не делались две выборки в одном и том же месте, так что все выборки были успешными в отношении местоположения.Различия в предварительно выбранных и фактических положениях на контакте с дном для санных тяг, определенных ITI, приведены на рисунке 5. По широте отклонение было небольшим, 60% приходилось на расстояние менее 20 м от желаемого места. . По направлению буксировки и долготе коридоров 79% тралений было удалено более чем на 60 м от заданной долготы.
По широте отклонение было небольшим, 60% приходилось на расстояние менее 20 м от желаемого места. . По направлению буксировки и долготе коридоров 79% тралений было удалено более чем на 60 м от заданной долготы.
Рисунок 5
Отклонение от предварительно выбранного положения салазок, измеренное ITI. (а) Вдоль направления буксировки (восток–запад) и (б) перпендикулярно направлению буксировки (север–юг).Обратите внимание на разницу в шкалах для (а) и (б).
Рисунок 5
Отклонение от предварительно выбранного положения салазок, измеренное ITI. (а) Вдоль направления буксировки (восток–запад) и (б) перпендикулярно направлению буксировки (север–юг). Обратите внимание на разницу в шкалах для (а) и (б).
Постобработка и немедленные физические эффекты
Постобработка данных RoxAnn перед тралением показала лишь незначительные различия в средних значениях шероховатости (E1) и твердости (E2) между коридорами (табл. 1).Эти параметры указывали на твердое дно, лишенное каких-либо крупных структур, хотя более поздние наземные наблюдения изменили эту интерпретацию. Некоторые вариации, особенно пики шероховатости в интенсивной зоне (рис. 6), можно объяснить, сравнив ее с положением гребней на записях бокового сканирования (рис. 4). Однако твердость не показала увеличения значений на гребнях. Значения жесткости перед тралением в целом были высокими, причем 49 % и 42 % для интенсивного (Т и ) и умеренного (Т м ) районов промысла соответственно имели значения, достигающие верхнего предела напряжения (4.095 В) системы RoxAnn. Цифры изменились на 42% и 50% после траления.
Некоторые вариации, особенно пики шероховатости в интенсивной зоне (рис. 6), можно объяснить, сравнив ее с положением гребней на записях бокового сканирования (рис. 4). Однако твердость не показала увеличения значений на гребнях. Значения жесткости перед тралением в целом были высокими, причем 49 % и 42 % для интенсивного (Т и ) и умеренного (Т м ) районов промысла соответственно имели значения, достигающие верхнего предела напряжения (4.095 В) системы RoxAnn. Цифры изменились на 42% и 50% после траления.
Рисунок 6
Разрезы величин Е1 и Е2 вдоль интенсивно (Т и ) и умеренно (Т м ) тралового участка до и после траления. Обратите внимание на разницу в масштабе для E1 и E2.
Рисунок 6
Разрезы величин Е1 и Е2 вдоль интенсивно (Т и ) и умеренно (Т м ) тралового участка до и после траления. Обратите внимание на разницу в масштабе для E1 и E2.
Таблица 1
Основные статистические данные по съемке RoxAnn перед тралением в районе исследований.
| Коридор . |
Действ. . |
Среднее значение E2 . |
Ст.д. Е2 . |
Среднее значение E1 . |
Ст.д. Е1 . |
|---|---|---|---|---|---|
| T i | 2254 | 3,908 | 0.281 | 0,225 | 0,067 |
| С 1 | 170 | 3,448 | 0,414 | 0,205 | 0,053 |
| С 2 | 82 | 3,663 | 0,386 | 0,276 | 0.070 |
| C 3 | 74 84 | 3.755 | 0.316 | 0.300 | 0.101 |
| T м | 1906 | 0,320 | 0,298 | 0,087 |
| Коридор . |
Действ. . |
Среднее значение E2 . |
Ст.д. Е2 . |
Среднее значение E1 . |
Ст.д. Е1 . |
||||
|---|---|---|---|---|---|---|---|---|---|
| T i | 2254 | 3,908 | 0,281 | 0,2025 0,2025067 | |||||
| С 1 | 170 | 3,448 | 0,414 | 0,205 | 0,053 | ||||
| С 2 | 82 | 3,663 | 0,386 | 0,276 | 0,070 | ||||
| C 3 | 84 | 3.755 | 3,755 | 0.316 | 0.300 | 3.836 | 0,320 | 0,298 | 0,087 |
| Коридор . |
Действ. . |
Среднее значение E2 . |
Ст.д. Е2 . |
Среднее значение E1 . |
Ст.д. Е1 . |
|
|---|---|---|---|---|---|---|
| Т и | 2254 | 3.908 | +0,281 | 0,225 | 0,067 | |
| С 1 | 170 | 3,448 | 0,414 | 0,205 | 0,053 | |
| С 2 | 82 | 3,663 | 0,386 | 0.276 | 0.276 | 0 0.070 |
| C 3 | 84 | 0.316 | 0.300 | 0.101 | ||
| T M | 1906 | 3.836 | 0,320 | 0,298 | 0,087 |
| Коридор . |
Действ. . |
Среднее значение E2 . |
Ст.д. Е2 . |
Среднее значение E1 . |
Ст.д. Е1 . |
|---|---|---|---|---|---|
| T i | 2254 | 3,908 | 0,281 | 0,2025 0,2025067 | |
| С 1 | 170 | 3,448 | 0,414 | 0,205 | 0,053 |
| С 2 | 82 | 3,663 | 0,386 | 0,276 | 0,070 |
| C 3 | 3.755 | 3,755 | 0.316 | 0.300 | 0.101 |
| T м | 1906 | 3.836 | 0,320 | 0,298 | 0,087 |
Пространственное изменение значений E1 и E2 хорошо соответствовало до и после траления (рис. 6). У T i траление вызвало увеличение рельефа поверхности (E1: критерий знака, z=4,5643, p<0,001) и уменьшение твердости осадка (E2: z=3,8340, p<0,001). Средняя разница в целом для T и до и после удара составила 0,01 и 0,11 В для E1 и E2 соответственно. В Т м различий между значениями до и после траления обнаружено не было (E1: z=1.6431, р=0,10; E2: z=0,5477, p=0,58). Количество наблюдений на контрольных трансектах было слишком мало для проведения каких-либо тестов.
Записи сонара бокового обзора не выявили признаков физического беспокойства до начала траления. После траления следы от выдровых досок были хорошо видны, за исключением гребней. Параллельные следы часто можно было увидеть на расстоянии около 140 м друг от друга, что соответствует размаху ворот. В нескольких местах также были видны небольшие углубления, сделанные зубчатым колесом. На рис. 7b (нижняя часть) не менее 8 из 10 тралений можно идентифицировать по отметкам, сделанным выдровыми досками.
После траления следы от выдровых досок были хорошо видны, за исключением гребней. Параллельные следы часто можно было увидеть на расстоянии около 140 м друг от друга, что соответствует размаху ворот. В нескольких местах также были видны небольшие углубления, сделанные зубчатым колесом. На рис. 7b (нижняя часть) не менее 8 из 10 тралений можно идентифицировать по отметкам, сделанным выдровыми досками.
Рисунок 7
Записи гидролокатора бокового обзора в районе интенсивного траления: (а) до траления и (б) после траления. Кружки обозначают ту же структуру. Белая средняя панель отражает расстояние от буксируемой рыбы до дна, и изменения этого расстояния влияют на яркость записи и охватываемую площадь. Примерное положение записей показано на рис. 2.
Рис. 7
Записи гидролокатора бокового обзора в районе интенсивного траления: (а) до траления и (б) после траления.Кружки обозначают ту же структуру. Белая средняя панель отражает расстояние от буксируемой рыбы до дна, и изменения этого расстояния влияют на яркость записи и охватываемую площадь. Примерное положение записей показано на рис. 2.
Примерное положение записей показано на рис. 2.
На видео видны следы траловых досок в виде U-образных впадин глубиной примерно 10 см и шириной 20 см, а с одной из сторон отходит округлая наносная насыпь высотой примерно 10 см. . Однако следы камнедробилки, очевидные с помощью гидролокатора бокового обзора, не могли быть обнаружены с уверенностью на видео.
Обсуждение
Описание зоны
Впервые мы использовали систему классификации дна RoxAnn для систематического выбора подходящей однородной (для уменьшения изменчивости) области исследования в большом пространственном масштабе (километры). Хотя было обнаружено, что его производительность зависит от скорости судна (Hamilton et al. ., 1999), RoxAnn может эксплуатироваться на высокой скорости (10 узлов в этом исследовании), а при большом расстоянии между линиями пути он покрывает большую площадь. за короткий промежуток времени (Магорриан и др. ., 1995). Слабость заключалась в том, что при предустановленной калибровке RoxAnn записи указывали на плоское морское дно, состоящее из плотно утрамбованного песка, без пятен более грубого материала, присутствующего на экспериментальном участке. Однако постобработка данных RoxAnn показала некоторые вариации на участке исследования, которые можно отнести к хребтам, наблюдаемым при боковом сканировании и видео (рис. 6). Этот недостаток может быть связан с тем, что размер этих пятен мал по сравнению с размером зоны охвата (106 м 2 ) луча эхолота, или с тем, что классы дна RoxAnn трудно определить, как это было предложено Гамильтоном и др. .(1999). Причина, по которой хребты не проявлялись как более твердое дно, может быть связана с пропускной способностью системы, а также с ростом биоты (вертикальные гидроиды, инкрустирующие усоногие и мшанки), которые могут снизить твердость. Использование прямоугольных прямоугольников для классификации дна является очень грубым способом группировки данных и может привести к неправильной идентификации (Greenstreet et al.
., 1995). Слабость заключалась в том, что при предустановленной калибровке RoxAnn записи указывали на плоское морское дно, состоящее из плотно утрамбованного песка, без пятен более грубого материала, присутствующего на экспериментальном участке. Однако постобработка данных RoxAnn показала некоторые вариации на участке исследования, которые можно отнести к хребтам, наблюдаемым при боковом сканировании и видео (рис. 6). Этот недостаток может быть связан с тем, что размер этих пятен мал по сравнению с размером зоны охвата (106 м 2 ) луча эхолота, или с тем, что классы дна RoxAnn трудно определить, как это было предложено Гамильтоном и др. .(1999). Причина, по которой хребты не проявлялись как более твердое дно, может быть связана с пропускной способностью системы, а также с ростом биоты (вертикальные гидроиды, инкрустирующие усоногие и мшанки), которые могут снизить твердость. Использование прямоугольных прямоугольников для классификации дна является очень грубым способом группировки данных и может привести к неправильной идентификации (Greenstreet et al. ., 1997). Однако система RoxAnn экономически эффективна и имеет то преимущество, что предлагает быструю классификацию структуры морского дна.Кроме того, данные RoxAnn можно собирать, когда судно выполняет другие действия.
Гидролокатор бокового обзора в первую очередь предназначался для подтверждения того, что возмущения трала оказали заранее определенное влияние, и для выявления того, как различные компоненты трала повлияли на структуру поверхности отложений. По крайней мере, 8 следов из 10 наблюдались в коридоре с интенсивным тралением, и вполне вероятно, что последние два были замаскированы последовательными выборками трала (Friedlander et al ., 1999). Комбинируя отпечатки бокового обзора, дно можно было увидеть как снимок, что позволило нам получить хорошее представление о фактических контурах дна и, в свою очередь, помогло нам при выборе участков для отбора проб с помощью саней, избегая грубых каменистых участков. Для получения сонограмм достаточно высокого разрешения гидролокатор приходилось буксировать близко ко дну со скоростью 3–5 узлов. Для этой операции требовались данные, предоставленные RoxAnn о топографии и глубине дна, чтобы спланировать путевые маршруты, которым не мешали бы быстро меняющиеся глубины или структуры на дне.Гидролокаторы бокового обзора охватывают большие территории за короткое время (Brown et al ., 2002), как и RoxAnn, но их работа требует полного внимания, поскольку это уязвимое и дорогое буксируемое устройство. Детали топографии были лучше, чем показал RoxAnn, однако постобработка данных бокового сканирования представляет собой сложную задачу, для которой требуется программное обеспечение для обработки изображений, а траловые тралы по-прежнему приходится подсчитывать вручную (Friedlander et al ., 1999).
Для этой операции требовались данные, предоставленные RoxAnn о топографии и глубине дна, чтобы спланировать путевые маршруты, которым не мешали бы быстро меняющиеся глубины или структуры на дне.Гидролокаторы бокового обзора охватывают большие территории за короткое время (Brown et al ., 2002), как и RoxAnn, но их работа требует полного внимания, поскольку это уязвимое и дорогое буксируемое устройство. Детали топографии были лучше, чем показал RoxAnn, однако постобработка данных бокового сканирования представляет собой сложную задачу, для которой требуется программное обеспечение для обработки изображений, а траловые тралы по-прежнему приходится подсчитывать вручную (Friedlander et al ., 1999).
Ни данные бокового сканирования, ни данные RoxAnn не дали информации о фактическом составе морского дна, которую можно было получить только с помощью наземных видеонаблюдений и проб бентоса.Видеосани дали окончательную и подробную характеристику участка, состоящего из ила/песка и ракушечника с вкраплениями продольных участков гравия и камней. Эта неоднородная картина усложняла отбор проб, поскольку считалось, что количественными считаются только пробы с мягкого дна, а совокупности, вероятно, различались между разными типами дна. Здесь видео имело решающее значение для выбора только выборок, сделанных за пределами каменистых участков. Образцы с видеосаней также показали, что бентический комплекс пригоден для количественного анализа.В предварительном исследовании два участка южнее были отклонены, один из-за того, что фауна была слишком редкой, а другой из-за того, что найденные животные не могли быть количественно отобраны с помощью саней Снели.
Эта неоднородная картина усложняла отбор проб, поскольку считалось, что количественными считаются только пробы с мягкого дна, а совокупности, вероятно, различались между разными типами дна. Здесь видео имело решающее значение для выбора только выборок, сделанных за пределами каменистых участков. Образцы с видеосаней также показали, что бентический комплекс пригоден для количественного анализа.В предварительном исследовании два участка южнее были отклонены, один из-за того, что фауна была слишком редкой, а другой из-за того, что найденные животные не могли быть количественно отобраны с помощью саней Снели.
Описание морского дна и оценка воздействия обычно включают один или несколько методов отбора проб, которые мы применяли в этом исследовании (Kaiser and Spencer, 1994; Schwinghamer et al. ., 1998; Tuck et al. ., 1998). Однако традиционный отбор проб может дать неверное представление о распределении эпибентических сообществ (Magorrian et al ., 1995). Наши результаты ясно показывают, что отдельные инструменты не могут обеспечить решающую основу без сравнения между платформами наблюдения. RoxAnn был способен к быстрому крупномасштабному картографированию потенциальных областей для проведения нашего эксперимента и показал, где в MPA расположены наименее неровные участки. Боковое сканирование выявило более мелкие детали, хотя с помощью этого инструмента нельзя было определить высоту и размер. Для получения подробной информации необходимо было собрать образцы отложений.После наземной проверки мы могли уменьшить масштаб и обобщить более крупные области на основе данных RoxAnn и бокового сканирования. С помощью RoxAnn мы могли охватить большую территорию в границах МОР, чем с другими инструментами. Если бы мы не использовали боковое сканирование, мы не смогли бы оценить пространственное распределение хребтов, которые не были должным образом нанесены на карту RoxAnn. Наконец, был бы большой риск неверно истолковать пространственные структуры местности, если бы мы использовали только видеосани, которые были необходимы для наземной проверки.
Наши результаты ясно показывают, что отдельные инструменты не могут обеспечить решающую основу без сравнения между платформами наблюдения. RoxAnn был способен к быстрому крупномасштабному картографированию потенциальных областей для проведения нашего эксперимента и показал, где в MPA расположены наименее неровные участки. Боковое сканирование выявило более мелкие детали, хотя с помощью этого инструмента нельзя было определить высоту и размер. Для получения подробной информации необходимо было собрать образцы отложений.После наземной проверки мы могли уменьшить масштаб и обобщить более крупные области на основе данных RoxAnn и бокового сканирования. С помощью RoxAnn мы могли охватить большую территорию в границах МОР, чем с другими инструментами. Если бы мы не использовали боковое сканирование, мы не смогли бы оценить пространственное распределение хребтов, которые не были должным образом нанесены на карту RoxAnn. Наконец, был бы большой риск неверно истолковать пространственные структуры местности, если бы мы использовали только видеосани, которые были необходимы для наземной проверки.
Позиционирование и отбор проб
Работа в небольших исследовательских районах в сжатые сроки (рис. 2), чтобы избежать пространственных и временных различий между лечебными и контрольными участками (например, Morrisey et al ., 1992a, b; Underwood, 1992; Hewitt et al . , 2001) делают необходимым точное наблюдение за положением буксируемых устройств в режиме реального времени. Было показано, что положение трала относительно судна сильно различается между тралениями и внутри них, в зависимости от курса судна по ветру и течению, а также от длины ваера (Engås et al ., 2000). Поэтому положение корабля нельзя было использовать для определения положения трала и саней. Отклонения положения саней в продольном направлении не считались решающими, так как перегонки не перекрывались и достигался хороший охват трансект. Однако точное позиционирование в широтном направлении имело решающее значение, так как самые маленькие коридоры имели ширину всего 100 м, и поэтому для решения этой задачи были приложены значительные усилия.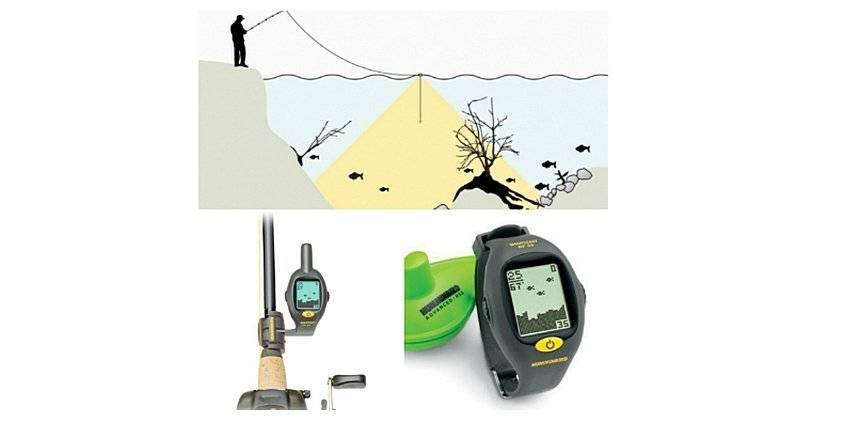 Это достигалось буксировкой саней по коридорам в направлении восток-запад.
Это достигалось буксировкой саней по коридорам в направлении восток-запад.
Как правило, для изучения воздействия выбираются самосвальные образцы, поскольку известно, что они дают более количественные результаты, чем сани и другие буксируемые устройства. Однако грейферы не подходят для отбора проб фауны с неравномерным распространением и низкой численностью (Bergman and Van Santbrink, 1994). Основная трудность в получении количественных проб с помощью буксируемых снастей, по-видимому, заключается в точном определении времени контакта снастей с морским дном и длины буксировки (Rice et al. ., 1982). Расстояние буксировки ранее оценивалось по колесам одометра (Колли и др. ., 1997; Prena et al ., 1999), хотя их точность сомнительна из-за их непостоянной эффективности на мягких отложениях (Carney and Carey, 1980; Prena et al ., 1996; M.J.N. Bergman, личное сообщение). В нашем исследовании замеры дальности санных тралений производились путем постобработки данных ИТИ совместно с видеонаблюдениями за временем контакта с дном, что позволило получить более качественные и достоверные оценки площадей по сравнению с оценками, основанными на продолжительности контакта с дном. таскает.
таскает.
Постобработка и физические эффекты
Было показано, что траление вызывает физические неудобства в районах интенсивного (700%) и умеренного (230%) траления. Борозды и бермы, созданные траловыми досками, были хорошо видны как на видеозаписях (одиночные следы траловых досок), так и на сонограммах бокового обзора (вид множества следов). Гидролокатор бокового обзора также использовался для демонстрации следов дверей в аналогичном эксперименте по тралению, который проводился на Гранд-Бэнкс у Ньюфаундленда (Schwinghamer и др. ., 1998) и в других районах (Service и Magorrian, 1997; Tuck et al. ., 1998; Friedlander et al. ., 1999). Имеются сообщения о глубине размыва до 0,3 м (Крост и др. ., 1990; Джонс, 1992). Однако глубина и долговечность борозд зависят от типа отложений (DeAlteris и др. , 1999), а также от веса, длины троса, угла атаки, типа двери и глубины. Сообщается, что глубина чистки траловых досок на песчаном морском дне находится в диапазоне 0–5 см (Брылинский и др. ., 1994; Gilkinson и др. ., 1998). В нашем эксперименте глубина размыва составляла до 10 см, что согласуется с типом отложений между песком и илом и более тяжелыми траловыми досками, использованными в нашем эксперименте.
., 1994; Gilkinson и др. ., 1998). В нашем эксперименте глубина размыва составляла до 10 см, что согласуется с типом отложений между песком и илом и более тяжелыми траловыми досками, использованными в нашем эксперименте.
Физические эффекты траления также были отражены в данных RoxAnn в том, что общая твердость снизилась после траления, что указывает на то, что утрамбованный ракушечник повторно взвешивался и уплотнялся тралом (Churchill, 1989; Pilskaln et al ., 1998). Большинство исследований сосредоточено на биоте отложений, и срочно необходимы исследования, изучающие вклад рыболовства в повторное взвешивание отложений (Kaiser et al ., 2002), следовательно, система RoxAnn может быть важным инструментом для документирования этого явления. RoxAnn также указал на увеличение шероховатости поверхности, и это наблюдение было подтверждено сонограммами бокового обзора, которые показали небольшие углубления, сделанные зубчатым колесом, в дополнение к следам от дверей. Возможность обнаружения каких-либо изменений с помощью RoxAnn зависела от уровня приложенных усилий, поскольку последовательных изменений не было продемонстрировано в районе с умеренным тралением. Изменения в характеристиках поверхности отложений после интенсивного траления также были продемонстрированы данными RoxAnn в аналогичных экспериментах, проведенных на Гранд-Банкс (Schwinghamer et al ., 1998) и в шотландском морском озере (Tuck et al ., 1998).
Последствия траления связаны с уровнем естественной изменчивости (Auster and Langton, 1999; DeAlteris et al ., 1999), и через 5 месяцев после траления следы досок не видны ни на боковом скане, ни на видео записи (наблюдения авторов). Небольшая глубина в экспериментальной области предполагает возможный перенос наносов, вызванный погодными условиями (Pfirman, 1985; Amos and Judge, 1991 (цит. по Solheim and Elverhøi, 1996)) в дополнение к веянию сильными течениями в этом районе (Huthnance, 1981; Solheim). и Elverhøi, 1996), оба фактора способствуют возможному высокому уровню естественной изменчивости песчаной среды обитания.Песок, как правило, представляет собой подвижный тип отложений, и долговременные топографические особенности не ожидаются (DeAlteris et al. ., 1999).
и Elverhøi, 1996), оба фактора способствуют возможному высокому уровню естественной изменчивости песчаной среды обитания.Песок, как правило, представляет собой подвижный тип отложений, и долговременные топографические особенности не ожидаются (DeAlteris et al. ., 1999).
Выводы
Была продемонстрирована потребность в пространственном перекрытии и дополнительных инструментах и приборах, позволяющих оценить любое возможное воздействие траления на донную фауну. Мы использовали три разных инструмента, каждый из которых предоставлял ценную информацию в соответствующем разрешении, масштабируя и охватывая область, которая соответствовала заданным требованиям для исследовательского сайта.Выводы, основанные на наблюдениях за одним изолированным инструментом, привели бы к неправильному толкованию. В районах, где подробная информация о состоянии дна неизвестна или где ожидается изменение топографии, наш подход должен быть уместным. В областях с известным гомогенным субстратом (например, Prena et al , 1999) эта экспериментальная установка может не понадобиться для надлежащего отбора проб, но вполне может использоваться для количественной оценки физических эффектов (данное исследование; Schwinghamer et al . , 1998). Точное позиционирование буксируемого оборудования и визуальные наблюдения во время отбора проб имеют решающее значение для объективного сбора данных.
, 1998). Точное позиционирование буксируемого оборудования и визуальные наблюдения во время отбора проб имеют решающее значение для объективного сбора данных.
Благодарим шкиперов и экипаж исследовательских судов. Джон-Арне Снели за то, что одолжил нам сани. Tore Høisæter за планирование и экспериментальный дизайн. Bjørn Totland, Svein Floen и Ingvald Svellingen за помощь в инструментарии и постобработке. Anne Britt Skaar Tyseland за подготовку карты. Студенты и волонтеры для помощи во время круизов.Норвежский исследовательский совет за финансирование этого исследования.
Каталожные номера
, .
Перенос наносов на восточной части континентального шельфа Канады
,
Исследование континентального шельфа
,
1991
, vol.
11
(стр.
1037
–
1068
), . .
Воздействие рыболовства на среду обитания рыб
,
1999
Местообитание рыб: необходимая среда обитания и реабилитация рыб. Американское рыболовное общество
Американское рыболовное общество
Симпозиум 22, Бетесда, Мэриленд
(стр.
150
–
187
), , .
Новые бентосные сани
33
(стр.
129
–
133
), , , , .
Мелкомасштабное картографирование комплексов морского дна в восточной части Ла-Манша с использованием гидролокатора бокового обзора и методов дистанционного отбора проб
54
2
(стр.
263
–
278
), , .
Воздействие камбаловых тралов на литоральную среду обитания и сообщество в бассейне Минас, залив Фанди
,
Canadian Journal of Fisheries and Aquatic Sciences
,
1994
, vol.
51
(стр.
650
–
661
).
Применение акустической системы классификации морского дна для оценки бентической среды обитания
17
5
(стр.
1459
–
1461
), .
Эффективность дозирующих колес для измерения площади, опробованной бимс-тралами
78
(стр.
791
–
796
) .
Влияние коммерческого траления на ресуспендирование и перенос наносов над континентальным шельфом Среднеатлантического залива
9
(стр.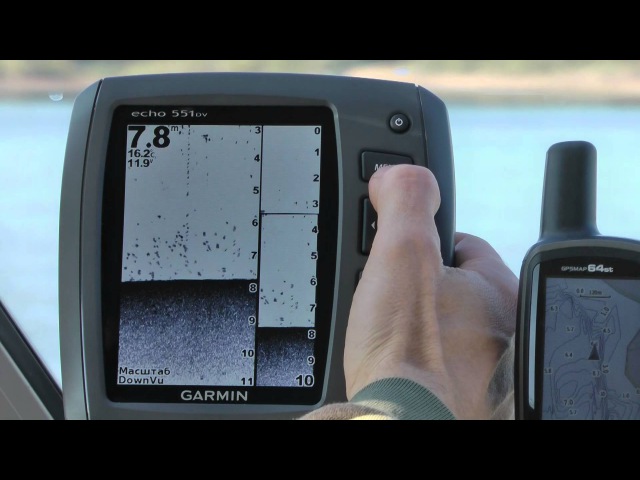
841
–
864
), , .
Воздействие донного промысла на донную мегафауну отмели Жорж
,
Серия «Прогресс морской экологии»
,
1997
, том.
155
(стр.
159
–
172
), , , .
Количественный анализ воздействия промысла на шельфово-морской бентос
69
(стр.
785
–
798
), , . .
Значение нарушения морского дна мобильными орудиями лова по сравнению с естественными процессами: тематическое исследование в заливе Наррагансетт, Род-Айленд
,
Среда обитания рыб: необходимая среда обитания и реабилитация рыб
,
1999
(стр.
224
–
237
), , .
Физическая среда. Западная часть Баренцева моря, лист А
,
Распределение поверхностных отложений
,
1983
Норвежский полярный институт
, , .
Сравнение следов судна и трала, наблюдаемых траловым прибором ITI
45
(стр.
297
–
301
), , , .
Влияние тралового промысла на донную среду обитания и связанные с ней таксоны беспозвоночных в заливе Аляска
182
(стр.
119
–
126
), , , , , .
Картографирование придонных траловых следов на шельфе и склоне у Юрики, Калифорния, с помощью гидролокатора бокового обзора
,
Рыболовный бюллетень
,
1999
, том.
97
(стр.
786
–
801
), , , .
Воздействие чистки траловой доски на двустворчатых моллюсков инфауны: результаты взаимодействия модели физической траловой доски с плотным песком
224
2
(стр.
291
–
312
), , , , , .
Оценка метода акустической съемки, RoxAnn, как средства картирования среды обитания на морском дне
54
(стр.
939
–
959
). ,
Влияние рыболовства на морские экосистемы и сообщества
,
1999
Oxford
Blackwell Science
, , .
Сравнение производительности системы акустической классификации дна RoxAnn и QTC-View в районе Кэрнса, Большой Барьерный риф, Австралия
19
(стр.
1577
–
1597
), , .
Оценка воздействия на окружающую среду: эффекты пространственной и временной изменчивости в возможных масштабах воздействия
,
Экологические приложения
,
2001
, том.
11
5
(стр.
1502
–
1516
).
Сильные приливные течения у острова Медвежий и связанные с ними приливные потери энергии в Северной Атлантике
28
1
(стр.
51
–
70
).
Воздействие траления на морское дно на окружающую среду: обзор
,
Новозеландский журнал морских и пресноводных исследований
,
1992
, том.
26
(стр.
59
–
67
), .
Воздействие рыболовства на морские экосистемы
,
Достижения в области морской биологии
,
1998
, vol.
34
(стр.
201
–
352
), , , , .
Модификация морских местообитаний при траловом промысле: прогноз и решения
3
(стр.
114
–
136
), . ,
Влияние рыболовства на нецелевые виды и среду обитания. Биологические, экологические и социально-экономические вопросы
Биологические, экологические и социально-экономические вопросы
,
1999
Oxford
Blackwell Science
, .
Поведение рыб при тралении в недавно траловых районах
112
(стр.
41
–
49
), , , .
Траловые следы выдры в Кильском заливе (Западная Балтика), нанесенные на карту гидролокатором бокового обзора
32
(стр.
344
–
353
), .
Взаимодействие морского рыболовства и среды обитания: в какой степени рыболовство и среда обитания взаимозависимы
24
6
(стр.
14
–
21
), , .
Акустическая классификационная съемка дна Странгфорд-Лох, Северная Ирландия
,
Журнал Морской биологической ассоциации Соединенного Королевства
,
1995
, том.
75
4
(стр.
987
–
992
), , , .
Пространственная изменчивость мягконаносного бентоса
,
Серия “Прогресс морской экологии”
,
1992
, том.
81
2
(стр.
197
–
204
), , , .
Временная изменчивость бентоса мягких отложений
,
Journal of Experimental Marine Biology and Ecology
,
1992
, vol.
164
2
(стр.
233
–
245
), , .
Захват с помощью видео: минимально разрушительный метод отбора проб азооксантеллатных коралловых отмелей
80
2
(стр.
365
–
366
), , .
Гипотезы сокращения численности трески в Северной Атлантике
,
Серия “Прогресс морской экологии”
,
1996
, том.
138
1–3
(стр.
293
–
308
), , , , .
Вылов морских пищевых сетей
,
Наука
,
1998
, том.
279
(стр.
860
–
863
).
Современное осадконакопление в Баренцевом море: привнос и отложение взвешенных наносов из талых ледниковых вод
,
1985
, , .
Повторное взвешивание отложений при донном тралении в заливе Мэн и возможные геохимические последствия
12
6
(стр.
1223
–
1229
), , , , .
Эксперимент по траловому лову выдр в Гранд-Бэнкс: 1. процесс выбора участка с описанием сообществ макрофауны
2094
, , , , , , .
Экспериментальное траление выдр в экосистеме с песчаным дном Гранд Бэнкс Ньюфаундленд: анализ тралового прилова и воздействия на эпифауну
181
(стр.
107
–
124
), , , .
Количественная оценка глубоководного мегабентоса; новый подход к старой проблеме
,
Oceanologica Acta
,
1982
, vol.
5
(стр.
63
–
72
), , , , , , .
Влияние экспериментального траления выдр на свойства поверхностных отложений экосистемы с песчаным дном на Гранд-Бэнкс Ньюфаундленд
,
Биология сохранения
,
1998
, том.
12
6
(стр.
1215
–
1222
), .
Масштабы и временные изменения нарушений эпибентических сообществ в Странгфорд-Лох, Северная Ирландия
77
(стр.
1151
–
1164
).
Сани простые донные для мелководного и глубоководного отбора проб
,
Сарсия
,
1998
, том.
83
(стр.
69
–
72
), . , , , .
Поверхностные отложения северо-западной части Баренцева моря
,
Berichte zur Polarforschung. Отчеты о полярных исследованиях. Состав поверхностных отложений и осадочные процессы в центральной части Северного Ледовитого океана и вдоль континентальной окраины Евразии
,
1996
Бремехафен, Германия
Институт полярных и морских исследований Альфреда Вегнера
(стр.
144
–
153
) , , , , .
Последствия физического траления на ранее не облавливаемом защищенном шотландском морском озере
162
(стр.
227
–
242
).
Помимо BACI: обнаружение воздействия окружающей среды на популяции в реальном, но изменчивом мире
161
(стр.
145
–
178
), , .
О выживании камбалы и камбалы, выбрасываемой при промысле оттер-тралов и бим-тралов в Северном море
26
1
(стр.
151
–
160
)
© 2003 Международный совет по исследованию моря
Обучение ROV и Sonar для правоохранительных и государственных органов
Члены Национального поисково-спасательного агентства Индонезии с инструктором-спасателем Уильямом Портером (сзади) и ROV Fisher.
Фото на врезке: президент и основатель Lifeguard Systems Бутч Хендрик.
Многие отделы полиции и шерифа, дайв-группы общественной безопасности и правительственные учреждения приобретают ROV и гидролокаторы бокового обзора для помощи в своих подводных поисковых операциях. ROV является отличным инструментом для этих операций, потому что, в отличие от водолаза, аппарат с дистанционным управлением может оставаться под водой на неопределенный срок, и на него не влияет глубина воды. Мощные подруливающие устройства продвигают ROV по дну, а камеры с высоким разрешением фиксируют четкое изображение подводной местности и отправляют его наверх для всеобщего обозрения. Гидролокаторы бокового обзора быстро обыскивают большие площади и создают подробные изображения подводной среды независимо от прозрачности воды.
Гидролокаторы бокового обзора быстро обыскивают большие площади и создают подробные изображения подводной среды независимо от прозрачности воды.
Большинство доступных на сегодняшний день компактных ДУА наблюдательного класса относительно просты в эксплуатации, но им нужно научиться. То же самое относится и к боковому сканированию. Как правило, персонал, назначенный для работы с этими системами, не имеет опыта работы с ними. Хотя многие команды сами учатся работать с устройствами, практическое обучение, проводимое опытными операторами, может очень быстро освоить команду.Одна компания, предлагающая обучение ROV и гидролокатору, — это Lifeguard Systems в Нью-Йорке. Компания Lifeguard была основана Уолтом «Бучем» Хендриком в 1970-х годах. Бутч посвятил свою жизнь обучению дайвингу, спасению, восстановлению и безопасности дайверов. За последние 40 лет он обучил тысячи полицейских, пожарных, спасателей, военных и спортивных дайверов в США и 15 других странах. Среди его клиентов — спасательная команда пожарной охраны Нью-Йорка, члены Федерального управления гражданской авиации и Департамента парков США.
За последние несколько лет компания получила все больше запросов на обучение ROV и сонару, так как все больше команд добавляют это оборудование.В ответ г-н Хендрик связался с JW Fishers Mfg, ведущим поставщиком этих систем для правоохранительных органов и дайв-сообществ общественной безопасности. У Fishers уже был внутренний курс обучения клиентов работе с оборудованием, но все больше групп запрашивали обучение на месте, особенно за границей. Спасатель идеально подходил для предоставления этих услуг, и обе компании договорились о партнерстве в поставках оборудования и обучении. Чтобы дополнить их навыки, спасатели пригласили Уильяма «Скитера» Портера.Его карьера в области дайвинга для обеспечения общественной безопасности началась в 1989 году в качестве волонтера в службе спасения дайвинга округа Чарльз в Мэриленде, и он быстро поднялся по служебной лестнице и стал начальником в 1994 году. Одним из его первых действий было приглашение Бутча для обучения команды, и двое мужчин стали верными друзьями. В 2005 году спасательная группа приобрела гидролокатор бокового обзора, и шеф Портер начал учиться им пользоваться. Через две недели команда обнаружила первую жертву утопления, и за первый год их число выросло до четырех.На сегодняшний день Портер участвовал в розыске более 30 жертв. В 2008 году он прошел курс обучения инструкторов NAUI через Lifeguard, и Бутч пригласил его присоединиться к команде. Имея за плечами сотни часов гидроакустических операций, Портер был идеальным дополнением к группе.
В 2005 году спасательная группа приобрела гидролокатор бокового обзора, и шеф Портер начал учиться им пользоваться. Через две недели команда обнаружила первую жертву утопления, и за первый год их число выросло до четырех.На сегодняшний день Портер участвовал в розыске более 30 жертв. В 2008 году он прошел курс обучения инструкторов NAUI через Lifeguard, и Бутч пригласил его присоединиться к команде. Имея за плечами сотни часов гидроакустических операций, Портер был идеальным дополнением к группе.
Одной из первых организаций, обученных спасателями, был Департамент шерифа округа Ольстер в долине реки Гудзон в Нью-Йорке. Департамент приобрел двухчастотный гидролокатор бокового обзора Fisher, поскольку он дает им высокое разрешение, необходимое для поиска небольших целей, таких как тонущие жертвы и оружие, а также имеет возможность дальнего действия для быстрого поиска больших площадей при поиске затонувших судов, затопленных транспортных средств или сбитый самолет.
Недавно команда спасателей проехала полмира, чтобы провести обучение ROV в Индонезии. Эта юго-восточная азиатская страна между Австралией и Малайзией представляет собой архипелаг, состоящий из более чем 17 000 островов. Два года назад, когда Национальное поисково-спасательное агентство страны закупило гидролокаторы бокового обзора и подводные видеосистемы Fishers, спасатели провели обучение на месте. Самым последним приобретением агентства стало несколько ROV Fishers, изготовленных по индивидуальному заказу в соответствии с требованиями миссии.Высокоманевренные дистанционно управляемые машины были оснащены четырьмя камерами, сканирующим гидролокатором, манипулятором, опцией компьютерного управления и множеством других специальных функций. Более 30 членов поисковой группы агентства прошли интенсивный курс обучения спасателей, охватывающий все аспекты эксплуатации и технического обслуживания оборудования, а также лучшие методы проведения эффективного поиска.
Для получения дополнительной информации о системах Lifeguard посетите сайт www.